Modeling and compensation of navigation error based on self-supervised LSTM network in complex environment
2024-03-20 00:37CHENGGuodaYUEYazhouWEIYanyiLISihai
中國慣性技術學報 2024年2期
CHENG Guoda ,YUE Yazhou ,WEI Yanyi ,LI Sihai
(1.School of Automation,Northwestern Polytechnical University,Xi’an 710072,China;2.AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China)
Abstract: Aiming at the problems that the inertial navigation system has interactive effects and navigation errors are difficult to identify in complex environment,a navigation error compensation method based on selfsupervised long short term memory (LSTM) network intelligent combination model is proposed.The selfsupervised temperature change rate module is proposed to overcome the limit of temperature sensor precision and provide temperature change rate in real time,which further improves the ability of the model to identify navigation error.In the experiment section,the effectiveness of the self-supervised module is verified through ablation experiments under various complex environment.Taking the northward velocity of flight test data as an example,the maximum absolute velocity error before compensation is 1.607 m/s,and 0.357 m/s after.Experimental results prove that the velocity and position error under complex physics environment could be effectively reduced,and the pure inertial navigation performance is therefore improved.
Key words: inertial navigation;long short term memory network;navigation error compensation;selfsupervised learning
The navigation performance of the strap-down inertial navigation system (SINS) is directly affected by the inertial measurement units (IMUs),and the performance of the IMUs fluctuates greatly due to the environmental influence.The SINS does not have a physical platform to isolate the angular motion of the aircraft,and the IMU is directly attached to the moving aircraft.Therefore,the gyroscope and accelerometer in the IMU will be directly sensitive to the angular and linear motion of the aircraft.Compared with the platform inertial navigation,the measurement range of the IMU in the strap-down inertial navigation,especially the angular velocity range of the gyroscope measurement,is much larger.Under high dynamic conditions,the SINS needs to accurately model and compensate for dynamic errors of gyroscopic and accelerometer to ensure navigation performance[1].When combined with global navigation satellite system (GNSS),the accumulative error could be diminished using Kalman filter[2].However,the satellite signal is not always available,resulting in deficiency of navigation performance.
On the one hand,the study of navigation error modelling compensation still requires further exploration.In the field of modelling the dynamic error of laser inertial navigation,state-of-the-art researches mainly focus on compensating for the dynamic error of accelerometer[3],while the study of gyroscopic dynamic error is relatively limited.The angular velocity measurement error model presented in Ref.[4] takes the anisoelasticity error caused by high-frequency jitter devices into consideration.Ref.[5]divides nonelastic error by device level and system level,and derives the drift error under certain specific motion conditions based on the relationship between gyroscope output and rotation vector.
On the other hand,the error mechanism of the entire IMU is not clear and the closed-form expression is difficult to establish.In reality,the non-rigid nature of the IMU caused by the mechanical jitter of the laser gyroscope may result in the actual error model much more complex beyond imagination.IMUs are not only sensitive to the temperature of individual time steps[6,7],but may also be related to other parameters (such as gradient and changing rate of temperature,etc.) of the temperature field around.Such quantities are difficult to collect through the relevant sensors.Hence,there is an urgent need to find a suitable method to build the part of the model that is difficult to obtain by simply analyzing physical properties.
Artificial intelligence and neural networks have attracted attention in study of nonlinear systems due to their superior representation ability,among which long short term memory networks (LSTMs) have brought fresh insights for time series data.The excellent learning ability of neural networks has made them widely adopted as a kind of general approximator in the identification of nonlinear dynamic systems[8].The theoretical analysis is rigorous and the system is mature for the classic function approximation theory.Neural networks provide a very effective black box tool for identification of nonlinear systems with their excellent function approximation ability.When dealing with time series data,recurrent neural networks (RNNs) are proved to be effective and gain widespread application.But there exists the inevitable long-term dependencies problem of RNN in practical use.In this case,LSTM was proposed to exploit long-term information by integrating gating mechanisms[9],therefore overcoming the internal possible gradient vanishing or explosion problems of RNNs.LSTM has been extensively applied in fields of computer vision,natural language processing and financial time forecasting.More recently,LSTM has been integrated with multiple techniques for exploiting the character and information of time series data.Ref.[10][10]combined LSTM with encoder-decoder structure for sequence-tosequence mapping and information compressing in power electronics converter modelling.Ref.[11] introduced advanced LSTM models by adding attention module on different layers.
LSTM networks have been adopted to enhance navigation performance in recent years,but the usage of temperature change rate requires further improvement.In recent years,LSTM networks have also been adopted in navigation era in order to compensate for the unknown time series navigation error model[12].Among the error models including black box model such as neural networks and white box model such as polynomial model,input variables commonly cover acceleration,temperature,magnetic information,etc.Temperature change rate has also been proven to be statistically significant as one of the input variables in error modelling[13].However,the accurate temperature change rate is difficult to acquire directly due to the precision limit of thermometers attached to IMUs.Under regular circumstances,the temperature of IMUs changes slowly over time and the thermometers is unable to reach ideal precision.Hence the ideal slope of temperature change rate could easily reduce to binary numerical temperature with the unit of minimum temperature measurement scale.While the linear filters could be easy to calculate and smoothen the temperature measurements in time domain,the filtered series still contain noises of certain level and have time lag with the length of the window.As a result,the precision of temperature change rate needs to be enhanced.
Self-supervised learning can exploit information from unsupervised data itself with the help of pretext model.Similar to regular regression task,the outcome of self-supervised learning is supposed to fit certain pattern.Unlike supervised learning where the labels are given in advance manually,the labels in self-supervised learning are produced with the assistance of pretext model during the learning stage.Although the pretext model is discarded during the prediction stage,its information is contained in the learned model.The self-supervised models are normally sorted into context-based,temporalbased and contrastive-based model.The ones based on temporal data have the assumption that the data have similarity over time,where the data of adjoining time are alike.Self-supervised learning could improve the performance of downstream tasks.More specifically,the navigation error is likely to be reduced with the usage of self-supervised module.
In order to improve the accuracy of inertial navigation,this paper presents a hybrid compensation method combining LSTM network with self-supervised temperature change rate for navigation error identification.In this paper,LSTM and self-supervised neural network are adopted to modelling the navigation error in addition to physical model to further improve navigation accuracy.Besides,the proposed algorithm introduces temperature change rate learned via the self-supervised neural network into the input variables.In this way,the information within temperature change rate could be utilized efficiently discarding the primitive noises.The contributions of this paper are as follows:
1) A hybrid navigation error compensation model is presented,which aims at enhancing the performance of the deterministic navigation model with the LSTM based self-supervised neural network model.
2) A self-supervised temperature change rate module is proposed to overcome the limit of thermometer precision and provide temperature change rate in real time.
3) The effectiveness of the hybrid error model and the self-supervised module is verified through experiments under various complex environment.
The rest of the paper is organized as follow.Section 1 briefly introduces neural networks and LSTM;Section 2 introduces the navigation error transfer model,analyses the influence of complex physical environment on navigation accuracy,and establishes a hybrid network model combining the navigation model and the neural network model;and Section 3 verifies the effectiveness of the hybrid model through experiments.
1 LSTM neural network
Neural networks form the connections among neurons with learnable linear parameters and nonlinear activation functions.In this paper,we adopt LSTM network to compose the mathematical model from the available inertial sensor measurement to the navigation error in complex physics environment.
1.1 RNNs
Among various network structures,RNNs are effective when handling time series data with variable length.A fully connected RNN updates its parameters by integrating the input of the neurons on the previous layer as well as its own information preserved from the previous time step.The property that the recurrent units share the parameters along time dimension enables RNNs to deal with time series data with variable length.Eq.(1) is an illustration of the update formula of the neuronhby timet:
Wherextdenotes the input of neuronhtfrom the previous layer,Uis the transition matrix of the recurrent unit,Wandbare the weight and bias parameters respectively,andσ(?) is the sigmoid activation function as Eq.(2).
Fig.1 is an expansion structure of how the recurrent unit passes the information of the inputxtand outputytalong timedimension.Nevertheless,na?ve RNN could face the problems of gradient vanishing and explosion in the back-propagation process when fitting a time series with long-term dependence.

Fig.1 Recurrent unit of na?ve RNN
1.2 LSTM
For the purpose of alleviating the problem of longterm dependencies of RNN,LSTM incorporates gating mechanism to update the internal nodes inside the recurrent unit.The recurrent unit of LSTM includes internal nodectfor state update,external nodethfor information flow,and candidate cell statec~tobtained from linear transformation.Fig.2 demonstrates the flowchart inside the recurrent unit of LSTM,including three types of soft threshold gates: Forget gateftthat determines the forgetting proportion from the external nodeht1-to the internal nodect1-,Input gatetithat determines the input proportion from candidate statetc~to internal nodect,Output gatetothat determines the output proportion from the internal nodectto the external nodeth.In Fig.2,⊙ denotes element-wise multiplication of two vectors,⊕ denotes element-wise addition and ⊕ denotes vector concatenation.

Fig.2 Recurrent unit of LSTM network
More specifically,the update process is calculated as Eq.(3).
Wherect,thanddenote the internal node,external node and candidate state in time stept.Uk,Wk,bk(k=f,i,o) denote the transition matrices,weights and bias parameters of three types of gates respectively.
2 Navigation error mechanism and model establishment
The main error sources of the navigation solution error are the initial condition error and the IMU error.The attitude alignment error in the initial condition also mainly depends on the IMU error.The other influencing factor is the solution error under high dynamic conditions.Among them,the performance of IMUs can be affected by the environment fluctuations greatly.Due to the lack of understanding the pattern how the environment (such as temperature,vibration,magnetic field,etc.) affects the accuracy of IMUs,it is difficult to accurately compensate for this part of the error,especially when the satellite signal is interrupted and pure inertial navigation is required.
2.1 Proposed hybrid model
As is shown in Fig.3,the hybrid model consists of a deterministic model of the navigation solution process and the LSTM-based self-supervised model.To be more specific,the outcome of IMUs first serve as the input of the mathematical model and are used to produce regular navigation metrics including attitude,velocity and position,as well as the deterministic error compensation process.The measurements are also conveyed to the unknown error modelling part to be fitted using the LSTM network for fine tuning the navigation error using time series measurement data.In this stage,the temperature change rate of high accuracy is first estimated by a pretrained self-supervised neural network,which later turns into one of the input variables of the LSTM error compensation model.The output of the two stages are then combined as the final navigation result.The deterministic and black box model are detailed in the following two parts accordingly.

Fig.3 Hybrid model structure
2.2 Deterministic navigation model
The deterministic model of attitude,velocity and position are calculated via the following mathematical expressions,as Eq.(4).
With the help of GNSS signal,the navigation error can be further corrected using Kalman filter.The state equation and the measurement equation are as Eq.(5),whereXis the navigation error state variable,Fis the system transfer matrix,andWis the time-variant noise matrix,Zis the system measurement variable,His the measurement matrix,andVis the measurement noise matrix.
Eq.(6) is the discretization of the state equation and measurement equation,wherekdenotes the time step,andΦk,k-1is the discrete transfer matrix from time stepk-1 tok.
In this way,the Kalman filter equation is as Eq.(7),whereXk|k-1is the estimation of state variable from time stepk-1 tok,Xkis the estimation state to be updated,Kkis the filter gain matrix andPkis the state covariance matrix,QkandRkare the covariance matrices of the process noiseWkand measurement noiseVkrespectively,Bk-1denotes the control-input matrix of the (k-1)-th time step,andUk-1is the control matrix.
From the derivation above,Kalman filter is able to tune navigation error with the help of GNSS signal.In order to compensate for such error when the signal is not available,the LSTM based self-supervised model is proposed in the next section.Under this circumstance,the error compensation model denoted by Kalman filter is now unknown,and the pure inertial navigation model is combined with the proposed LSTM based self-supervised model for better performances.
2.3 LSTM based self-supervised model
The data used to train the LSTM network is the error between the velocity information obtained from the navigation solution and the ground truth trajectory velocity.Such data could be obtained when the GNSS data is available,shortly after the GNSS signal is interrupted,it is safely to assume that the environment is similar and the inner influence remains in certain pattern.The input of the LSTM network contains two parts: one part is the angle and acceleration information of the sensitive output of the gyro and accelerometer;the other part is the information related to the environmental parameters,including time,temperature,vibration (the acceleration information can be considered as a reflection of system vibration to some extent),magnetic field information,temperature change rate,etc.The input is expressed as
In order to take full advantage of the temperature change rate,a pretrained neural network is combined to the LSTM network.Due to the limit of thermometer accuracy,the temperature change rate calculated by difference or linear filter is not satisfactory.The temperature difference may reduce to binary variable,consequently bringing additional noise to the current model.To this end,we first fit the known temperature curve and gain the smoothened temperature with ideal accuracy,the difference of which turn out to be the selfsupervised temperature change rate labels for later regression task.Then a neural network is trained to fit the ideal temperature change rate in real-time.The input of the network is time and current temperature,the output of the network is the ideal temperature change rate calculated previously.Finally,the output of the self-supervised network,the ideal temperature change rate can serve as one of the input variables of the LSTM network.The efficiency of the self-supervised neural network to simulate temperature change rate is compared with linear filters such as mean filter and gaussian filter in Section 3.
The LSTM network is then used to fit the mapping from measurementsUto the deviation between the dynamics model output and ground truth.The output of the navigation solutionY=[vE,vN,λ,L]Tdenotes eastward velocity,northward velocity,longitude and latitude.Therefore,the training data for the LSTM network can be expressed as time series data pairs{U1,ΔY1},{U2,ΔY2}… {UM,ΔYM}.The output of LSTMare then added to the dynamic output,formulating the compensated navigation solution values.
Another consideration lies on the data chosen to train the self-supervised network and LSTM model.If the navigation data of the same navigation is available,the model learned from multiple navigation processes could be used to predict error in another process.However,in most cases,the proposed hybrid model aims at compensating navigation error in more complex physics environment.Considering that such environment easily varies from navigation to navigation yet is hard to quantified,the time series data from one navigation are split to serve as both training and testing data for the LSTM network.In this way,the assumption that both training and testing data are sampled from the same distribution is more likely to satisfy without obtaining data of comprehensive circumstances.Besides,the limited amount of training data makes the training complexity bearable.The effectiveness of the proposed hybrid model is verified on both types of data in the next section.
3 Simulation and test verification
In this section,the effectiveness of the proposed method is verified through experiments.As is described in the previous section,the ground truth velocity and position data are required so as to obtain the ground truth error to compensate via LSTM network.We use the ideal values or GPS data under more complicated circumstances to serve as ground truth value.The hyperparameters of LSTM are carefully chosen through comprehensive validation of several navigation data.For the sake of consistency,the hybrid model is performed under the same environment (MATLAB R2020b on a work station with Intel Xeon Gold 6248R CPU @3.00 GHz,1.80 GHz of 64bit Windows operation system).
Two types of measured data from different real experiment conditions are collected for verification.Section 3.1 is based on ground test data,where multiple navigation time series data is acquired under the same complex environmental condition.We use cross validation to sufficiently verify the efficiency of the proposed method,where for each time one time series data is for validation and other series combined are for training.Section 3.2 is based on flight test data from GNSS/SINS system.The time series is then split into training data and testing data,consisting of the first 80% and the last 20%time of the data respectively.The experiments are then conducted on both data under the same condition that the navigation error ground truth is available and the environment is the same for training and testing data.
The quantification performance is evaluated via the ratio of mean absolute percentage error (RMAPE) and the ratio of median absolute percentage error (RMedAPE) of the navigation error before and after compensation as Eq.(8).yiis the error of pure inertial navigation before compensation ofi-th time step,is the estimated error,andis the navigation error after compensation.A smaller value of both metrics denotes a better outcome.RMAPEandRMedAPEtogether reflect the performance of compensation and avoid the influence of outliers.
3.1 Ground test data
The ground test data include multiple time series data under the same environmental condition.To be specific,several sets of experiments are conducted in the same location,under the same vibration of 90 Hz and with similar temperature and magnetic.In this case,the ground truth velocity and position are regarded as constants.For the purpose of sufficient verification,the 6 time series data are cross validated.Fig.4 displays the acceleration pulse of three axes.For the first ten minutes,the IMU remain still for static base alignment procedure,and the vibration starts after the alignment.

Fig.4 Acceleration output of IMU
The necessity of pre-processing the temperature change rate is first demonstrated.As mentioned in section 2,the self-supervised module could simulate the ideal temperature change rate in a more smooth and realtime way than simple difference or linear filter.Fig.5(a) is the difference of the temperature of an accelerator.It can be observed that the binary form fails to represent temperature change rate.It derives from the fact that thermometer precision is limited and temperature changes slowly.As a result,the random noise turns to cover the real temperature change information.Fig.5(b) and Fig.5(c)are the raw temperature curve and the smoothened curve.The information lying in the ideal temperature change is buried without appropriate pre-processing.

Fig.5 Thermometer temperature curve
The smoothing effect of the proposed self-supervised module is hereby compared with linear filters.From top to bottom,Fig.6 displays the temperature change rate processed via mean filter,Gaussian filter and the proposed self-supervised neural network and the ideal temperature change rate.In Fig.6(d),the ideal temperature change rate is calculated by differencing the smoothened temperature as Fig.5(c).It can be seen that the linear filters still reserve the noisy steps and have time lag,and the proposed network is able to produce temperature change rate closer to the ideal rate.
Tab.1 demonstrates theRMAPEandRMedAPEresult of the proposed method.The proposed self-supervised LSTM model (ours) is compared with simply using the LSTM network.The better results of eastward and northward velocity,latitude and longitude are stressed in bold.TheRMedAPEof the error of both methods after compensation are smaller than 1,which means that black box model could eliminate navigation error,therefore improving the navigation performance.It can be also observed that on the 6 cross validation data,the proposed method is better than simply using LSTM network for most cases,which indicates the accuracy of the selfsupervised temperature change rate.

Tab.1 Compensation result of ground test data
Fig.7 and Fig.8 are the eastward and northward velocity error of 6 series before and after compensation,where the blue lines are the inertial error before compensation,the red lines are the error simulated by the proposed model,and the black dashed lines are the navigation error after compensation.The eastward and northward velocity represent two circumstance of data distribution respectively.Fig.8 denotes the case when experimental conditions are identical and the outputs are similar,and Fig.7 denotes the case when experimental conditions are identical but the outputs are unalike.In both cases,it can be observed that error curves after compensation have been flattened for most cases,graphically testifying the effectiveness of the proposed method.

Fig.7 Cross validation of northward velocity compensation

Fig.8 Cross validation of eastward velocity compensation
3.2 Flight test data
The flight test data records 10-hour GNSS/INS navigation data from one single flight.4 intervals starting at hour 2,4,6 and 8 are selected for verification.In each time interval,the first one hour is used to train the black box models and the last 15 minutes is for validation.
Tab.2 demonstrates the quantification results of the 4 intervals.As shown in Tab.2,theRMedAPEresults of both black box models are significantly smaller than 1,indicating that the compensation model could enhance the performance of pure inertial navigation.The LSTM model with self-supervised temperature change rate also gains better result than the baseline LSTM model in the flight test condition.

Tab.2 Compensation result of flight test data
Fig.9 displays the velocity and position error in the same time interval,where the blue lines are the error curve before compensation and the black dashed lines are the error after.Fig.10 and Fig.11 are the eastward and northward velocity of 4 intervals,where the blue lines are the error of training and validation data before compensation and the black dashed lines are the error of validation data after compensation.
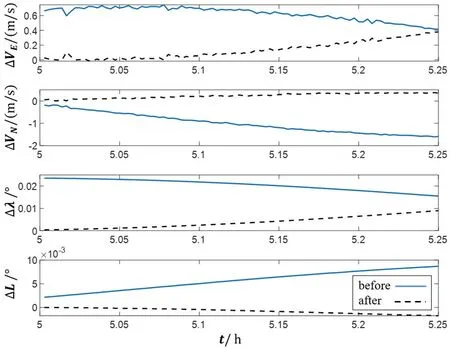
Fig.9 Error compensation result of flight test data
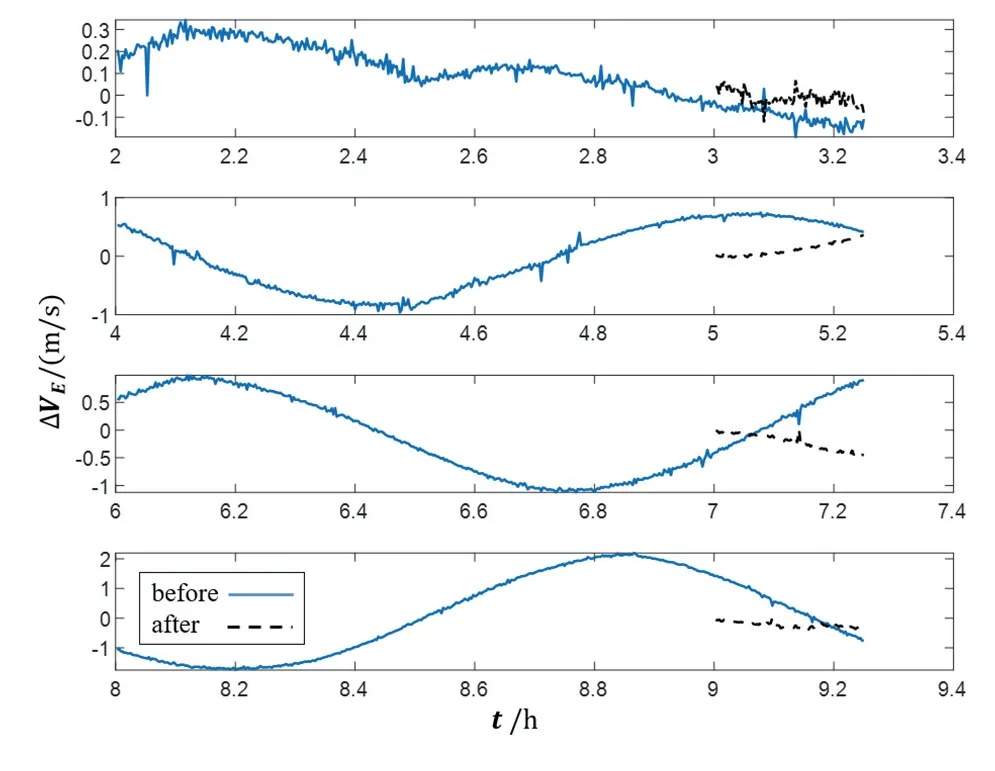
Fig.10 Northward velocity compensation in flight test

Fig.11 Eastward velocity compensation in flight test
Taking the northward velocity in Fig.9 as an example,the maximum absolute velocity error before compensation is 1.607 m/s,and 0.357 m/s after.It can be observed that the errors of velocity and position are greatly reduced after via LSTM network.More importantly,the fluctuation in the velocity is flattened,which indicates the potential of the proposed hybrid model to deal with complex physics model.It has been verified that the proposed method significantly improves pure inertial navigation performance under complex physical field environment.
4 Conclusion
In this paper,a hybrid model of navigation error identification network in complex physical environment is proposed.A self-supervised LSTM network has been combined with the deterministic navigation error model to improve the navigation accuracy.The effectiveness of the mixed error model is verified through experiments.After compensation,the velocity and position error in complex physical environment are greatly reduced,and the pure inertial navigation performance is therefore enhanced.In the future,feature extraction methods including principal component analysis (PCA) or factor analysis (FA) are considered to be applied on the temperature measurements to reduce correlation among input variables.