
An intelligent control method based on artificial neural network for numerical flight simulation of the basic finner projectile with pitching maneuver
2024-03-20 06:44YimingLingGungningLiMinXuJunminZhoFengHoHongoShi
Defence Technology 2024年2期
Yiming Ling, Gungning Li, Min Xu, Junmin Zho , Feng Ho , Hongo Shi
a Northwestern Polytechnical University School of Astronautics, Xi’an 710072, China
b China North Industries Group Corporation No 203 Research Institute, Xi’an 710065, China
Keywords:Numerical virtual flight Intelligent control BP neural network PID Moving chimera grid
ABSTRACT In this paper, an intelligent control method applying on numerical virtual flight is proposed.The proposed algorithm is verified and evaluated by combining with the case of the basic finner projectile model and shows a good application prospect.Firstly, a numerical virtual flight simulation model based on overlapping dynamic mesh technology is constructed.In order to verify the accuracy of the dynamic grid technology and the calculation of unsteady flow, a numerical simulation of the basic finner projectile without control is carried out.The simulation results are in good agreement with the experiment data which shows that the algorithm used in this paper can also be used in the design and evaluation of the intelligent controller in the numerical virtual flight simulation.Secondly, combined with the real-time control requirements of aerodynamic, attitude and displacement parameters of the projectile during the flight process,the numerical simulations of the basic finner projectile’s pitch channel are carried out under the traditional PID(Proportional-Integral-Derivative) control strategy and the intelligent PID control strategy respectively.The intelligent PID controller based on BP(Back Propagation) neural network can realize online learning and self-optimization of control parameters according to the acquired real-time flight parameters.Compared with the traditional PID controller, the concerned control variable overshoot, rise time, transition time and steady state error and other performance indicators have been greatly improved, and the higher the learning efficiency or the inertia coefficient, the faster the system, the larger the overshoot, and the smaller the stability error.The intelligent control method applying on numerical virtual flight is capable of solving the complicated unsteady motion and flow with the intelligent PID control strategy and has a strong promotion to engineering application.
1.Introduction
In order to meet the agility and maneuverability requirements of the extreme performances in extreme conditions such as high angle of attack,aggressive maneuvers with high angular rates,new modern advanced aircrafts including all kinds of fighter jets, missiles, and near space hypersonic vehicles, are often faced with the deterioration of flight stability and maneuverability under the coupling of complex unsteady aerodynamics and nonlinear flight dynamics.In the complex maneuvering flight of aircraft,when the unsteady and asymmetric vortex in the flow field plays a dominant role,the aerodynamic forces and torques borne by the vehicles are unsteady and nonlinear.Traditionally, aerodynamic coefficients and derivatives obtained by wind tunnel tests or Computational Fluid Dynamics (CFD) methods are steady and linearized, which cannot accurately describe the real-time flight characteristics and motion laws of the aircraft.As a result,the applicability of the flight control laws designed by linear small disturbance theory is greatly limited.The evaluation of the dynamic characteristics and the control system capability of the aircraft can only be assessed and verified by the high-cost flight test[1-4].As the higher and higher demands are proposed for the flight control system of the modern aircraft, traditional linear control theory will face more and more problems of the real-time flight control for complex flights,and the traditional aircraft system identification and modeling method cannot satisfy the accurate and stable requirements of the flight control system in complex maneuvering flight condition [5].
With the development of supercomputing technology and multidisciplinary coupling analysis technology, numerical virtual flight technology has been in attracting more and more research effort, and is becoming a potential and promising research area.A lot of progress has been made recently with the numerical virtual flight technology.In 2005, Jubaraj Sahu used numerical virtual flight technology to predict the time-accurate unsteady aerodynamics and the flight trajectories of an ogive-cylinder-finned projectile at various speeds.Computed positions and orientations of the projectile have been compared with actual data measured from free-flight tests and are found to be generally in good agreement [6].In 2007, Mark Costello applied numerical virtual flight technology to a sample supersonic finned projectile investigation.A comparison of spark range obtained aerodynamic coefficients with the estimation method exhibits good agreement [7].In 2012,Jubaraj Sahu and Mark Costello added the Flight Control System(FCS) element to the coupled CFD/RBD(Rigid Body Dynamics)technique.The coupled CFD/RBD/FCS capability has been exercised on a canard-controlled projectile and demonstrated with a roll control and a cross-range control with control law and feedback loop[8].In 2016,Ke Xi realized the angle of attack control of the fast maneuver process of a basic finner projectile with the numerical virtual flight technology[9].In 2017,Chen Qi used the engineering technique and the coupled CFD/RBD/FCS technique to evaluate of performance of flight control system at the control process in roll on a square cross section vehicle [10].Besides, Wang Sheng used the fuzzy control theory to design the flight control system and realized the angle of attack control with numerical virtual flight technology [11].In 2019, Laiping Zhang presented a CFD-based Numerical Virtual Flight simulator and design the control law by a nonlinear dynamic inversion method to carry out the pitching maneuver process [12].In 2022, Chen Xiang modeled unsteady aerodynamic forces and moments of a fight aircraft by using the time-dependent characteristics of recurrent neural network, and verified the unsteady aerodynamic model by combining virtual flight test [13].In 2023, Lang Yan designed a missile pitch control law through deep reinforcement learning based on the aerodynamic model,which enables the realization of a robust and exact angle-of-attack control process [14].
Meanwhile,in the area of the control system,machine learning technology has been successfully applied to many practical fields,and has achieved very remarkable results.In 2016,Zhang T adopted a method of guided strategy search to realize UAV(Unmanned Aerial Vehicle) obstacle avoidance control by combining deep learning and model predictive control [15].In 2017, Hennes D proposed an estimation method by using machine learning technology to predict the optimal arrival mass of spacecraft operating in the main planet belt,and the result is an order of magnitude more accurate than the traditional estimation method [16].Li Q optimized the flight trajectory of the quadrotor by combining the traditional PID controller with deep neural network,and made the aircraft complete the training of various flight trajectories to compensate for the unknown delay caused by PID control,so as to improve the performance of the PID controller [17].
Numerical virtual flight technology based on machine learning is the organic combination of Computational Fluid Dynamics,Rigid Body Dynamics(RBD)and Intelligent Control Law(ICL).It provides a new technical approach and direction to solve the aerodynamic/motion/control coupling problem of the aircraft.Also, numerical virtual flight technology based on machine learning is essentially a kind of multidisciplinary coupled time-domain analysis technology.It combines different disciplines with unsteady CFD as a link,which can realize high-precision real-time simulation of nonlinear and unsteady aerodynamic effects of the aircraft, and solve the coupled trajectory equation of rigid body with six degrees of freedom to obtain the actual flight trajectory,attitude and flow field information.The real-time virtual flight technology coupled with CFD/RBD/ICL can be compared and verified with the typical flight simulation process, so the motion law and control effect can be directly analyzed.Because of the intelligent control algorithm of the machine learning, the controller has the ability of online learning and the characterization of nonlinear behavior,which can adjust and optimize the controller parameters online, so as to improve the performance of the control system.
Although a large number of numerical virtual flight studies have been carried out for different vehicles, and machine learning technology has also made remarkable achievements in many practical fields, most of the research work on numerical virtual flight simulation is uncontrolled flight or coupled with traditional PID controller,and the application of machine learning algorithm in flight control system is usually based on the simulation modeling of steady aerodynamic database which is incompetent to describe the unsteady and nonlinear aerodynamic phenomena.With the increasing demand for multidisciplinary coupled analysis and optimal design of the future aircraft, the coupling of machine learning to numerical virtual flight technology will become an important means of analysis and research.
With the above all mentioned in mind,a numerical virtual flight algorithm coupled with intelligent control law is constructed in this paper.Through the CFD/RBD coupling algorithm, the real-time update of aerodynamics and attitudes of the basic finner projectile during the controlled flight are realized.The BP neural network was introduced to self-learn and actively adjust PID controller parameters,so as to realize the intellectualization of the flight attitude control system of the basic finner projectile.Then,according to the case of the basic finner projectile, the state of free flight without control is simulated, and the numerical virtual flight calculation method established is evaluated and verified.Secondly, based on the established CFD/RBD numerical virtual flight simulation algorithm, aiming at the pitch channel of the basic finner projectile,combining the traditional PID control strategy and the BP neural network PID intelligent control strategy,the fast and stable control of the pitch angle after free release and the tracking control flight of step and sinusoidal pitch angle input simulations are realized.The results indicate that compared with the traditional PID controller,the PID intelligent controller based on the BP neural network has significantly improved the performance indicators of the control variables.
2.Computational modeling
2.1.Adaptive intelligent control law model
2.1.1.Traditional incremental PID controller
In the traditional flight control system, the proportionalintegral-derivative (PID) controller is the most widely used controller.Fig.1 depicts the schematic of the traditional incremental PID controller.Where ydis the desired state, y is the real time state, u is the amount of the control surface deflection.The gain parameters Kp(propotional coefficient), Ki(integral coefficient),and Kd(derivative coefficient)are chosen experimentally to obtain a desirable time response of the system.
It has the form

Fig.1.The schematic diagram of the traditional incremental PID controller.
where u(k-1) and u(k) represent the control quantity of the previous frame and the current frame respectively,and Δu(k)represents the control increment of the current frame.e(k), e(k-1) and e(k-2)stand for the tracking errors of the current frame and the previous two frames.
For the traditional PID controller design process, The engineer needs extensive engineering experience to adjust the three control parameters of Kp, Kiand Kd, and it will greatly increase the design workload,which is not conducive to the rapid design of the control system.
2.1.2.BP neural network PID controller
The BP neural network PID controller is a kind of real-time intelligent PID controller with self-learning and adaptability.Through online self-learning of BP neural network, the expression of any nonlinear system can be realized,so that BP neural network can achieve the optimal combination of PID control parameters.The traditional PID controller adjusts the controlled object directly,while the BP neural network adjusts Kp, Kiand Kdautomatically according to the running state of the control system so as to realize the adjustment of the controlled object indirectly.
In this paper, through the self-learning and weight adjustment of BP neural network, the three PID control parameters output by BP neural network can make corresponding real-time adjustment to the changes of the control system.The control principle is shown in Fig.2.For each numerical virtual flight process, the BP neural network system needs to re-learn, but only the initial training sample need to be provided.In the simulation process, the results of the previous step provide training samples directly for the next step of the simulation.Therefore, the number of BP network learning samples is increased in real time during the simulation process.
In this paper, a 3-5-3 structural BP neural network with three layers is constructed to automatically adjust the control parameters of PID controller.The neural network has three layers with 3 nodes in input layer,5 nodes in intermediate layer and 3 nodes in output layer.Wherein,the input of BP neural network is the expected value of the system yd,the actual output value y and the deviation e=ydy; The output is proportional coefficient Kp, integral coefficient Kiand differential coefficient Kd.The number of hidden layer nodes can be calculated according to Eq.(3).
where,m is the number of hidden layer nodes,n is the input layer node number, l stands for the output layer node number, a is constant between 1 and 10.This paper unified the selection a=2,the number of hidden layer nodes is calculated to be 5.
The activation function of neural network is sigmoid function and the loss function is the mean square error (L2 Loss) function.Due to the characteristics of sigmoid function, the initial weight close to 0 with a relatively high rate of change can accelerate the response speed of the network at the beginning, and the fixed initial weight is set as a random number within the range of[-0.1,0.1].
2.2.Computational Fluid Dynamics model
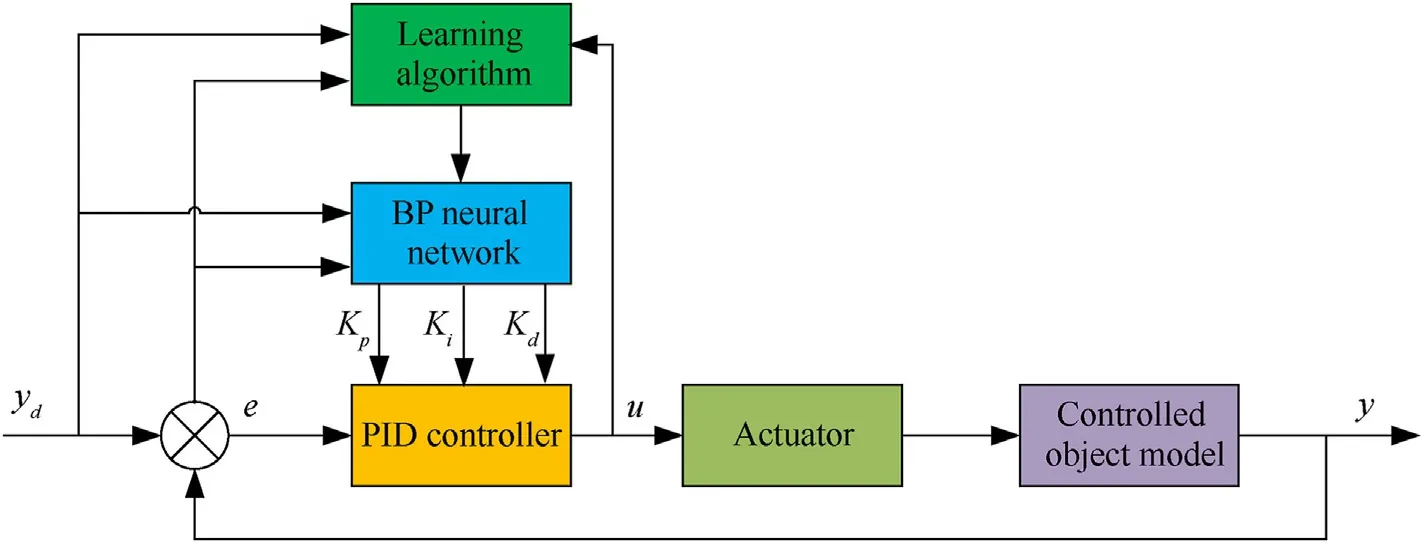
Fig.2.Schematic diagram of intelligent PID control based on BP neural network.
The CFD solver[18,19]independently developed by our research group with multi-block structured design is used to solve and analyze the flow field.The unsteady flow fields are calculated by solving the three-dimensional time-dependent Reynolds-Averaged Navier-Stokes(RANS)equations.The spatial discrete format is Total Variation Diminishing (TVD) format, and the two-equation realizable k-ε turbulence model is adopt for the computation of turbulent flows.Implicit dual time-stepping is used to carry out the desired time-accuracy.The set of far-field boundary condition is the nonreflection boundary condition based on the local one-dimensional Riemann invariant and the boundary condition of the projectile is the adiabatic, viscous non-slip wall.
The conservation form of the three dimensional(3D) dimensionless, unsteady, compressible, RANS equations in body-fitted coordinates is as follows [20]:
where Q stands for the vector of conservative variables,F,G and H are the convection flux vectors, Fv, Gvand Hvare the viscous flux vectors, t stands for time, and Re∞is the Reynolds number of free stream.
The chimera technique[21-26]here is used to simulate a timedependent relative motion of different geometries by creating overlapping grids.The overset grid gets rid of the restriction of structured grids’ topology and grids with different topologies can be generated independently for arbitrary complex geometries.When the projectile is moving dynamically, the computational grids are fixed on the wall of the projectile.The subgrid only need to overlap or cut the background grid repeatedly without grid reconstruction or deformation.In the simulation presented in this paper, the relative motion between the control surface and the main body of the projectile is described by using the background grid which includes the whole calculation domain and the subgrid of the moving parts.
2.3.Rigid body dynamics model
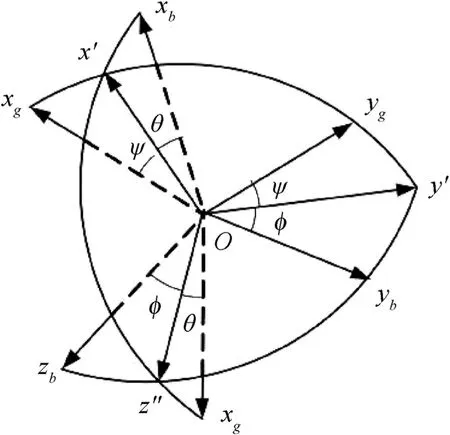
Fig.3.Reference frame.
In the simulation presented in this paper,the body orientation is defined by the use of Euler angles in the standard aerodynamic sequence of rotations.The reference frames used for the simulation are the standard inertial and body frames (Seen in Fig.3).The inertial frame,g,is fixed to the ground and the body frame,b,is fixed to the center of mass of the projectile.The frame,′, is the transitional frame between the b and g.The projectile state vector is comprised of the inertial position components of the projectile mass center (x,y,z) and the standard Euler angles(θ,ψ,γ) and the body frame components of the projectile mass center velocity(u,v,w) and the body frame components of the projectile angular velocity vector(p,q,r).
The RBD equations are given in the equations below.The nonlinear differential equations can be solved by using a fourthorder Runger-Kutta method.
where V is the velocity vector,G is the gravity vector,F and M in the above equations represent the total forces and moments applied to the projectile.H stands for momentual vector respect to the center of mass.
2.4.The CFD/RBD/ICL coupled numerical virtual flight simulation model
In this paper,based on the CFD solver independently developed by the research group,unsteady CFD computing technology is used as the link,combined with the commercial MATLAB software.CFD,RBD and ICL are coupled together through the development of corresponding I/O files for data interaction[9-13].Its solution flow chart is shown in Fig.4.The specific steps are as follows:
1) Obtain the convergent initial flow field,aerodynamic forces and torques by the steady CFD calculation.
2) Solve the governing equation of unsteady flow, and obtain the aerodynamic forces and torques of the projectile through CFD module at time t, and transfer them to RBD module.
3) The displacements and velocities of the projectile at time t are obtained by solving the RBD module, and transfer them to the ICL module and the Grid Overset module.
4) The ICL module calculates the deflection angle of the control surfaces and transfer it to the Grid Overset module.
5) The Grid Overset module update the grid at time t + Δt and transmits it to the CFD module for calculation at time t +Δt.
6) Dual time-stepping method is used to advance the time step to obtain the updated flow field.
7) Return to step 2), and repeat until the end of the entire flight process or desired physical simulation time is reached.
3.Validation of the numerical method
3.1.Computational model
The computational model for the simulations is the basic finner projectile.It consists of a 20°nose cone on a cylindrical body with four rectangular fins [27,28] as shown in Fig.5.The length of the projectile is 10 calibers and the nominal diameter of the tested projectiles in the aeroballistic range and in the wind tunnel was 0.3 m.The conical nose is 2.84 calibers long and is followed by a 7.16 calibers cylindrical section.Four fins are located on the back end of the projectile.Each fin is one caliber long, and has a thickness of 0.08 calibers at the base.The reference center of gravity location is at 5.5 calibers from the nose of the projectile.The physical achieve a y+value of 1.0.The main body and four rectangular fins were gridded separately and this significantly reduced the restrictions on grid generation.The grids are then overset with each other using a chimera method.The total number of grid points in this case is approximately 6 million.The far field boundary is the Riemann boundary condition, and the solid wall was the adiabatic and viscous no-slip condition.The physical time step is 5 ms, and the number of inner iteration steps is 20.The initial flow field is the result of the steady computation at 1.018°angle of attack(As seen in Fig.7).

Fig.4.Solution strategy diagram of numerical virtual flight based on machine learning.
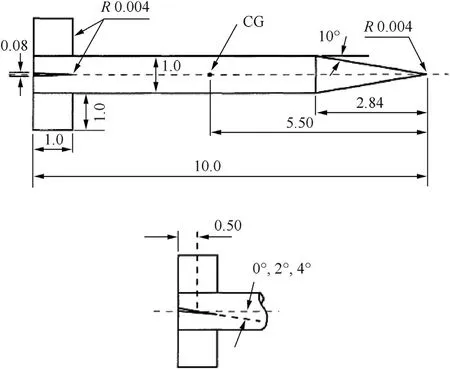
Fig.5.Schematic of the basic finner projectile.
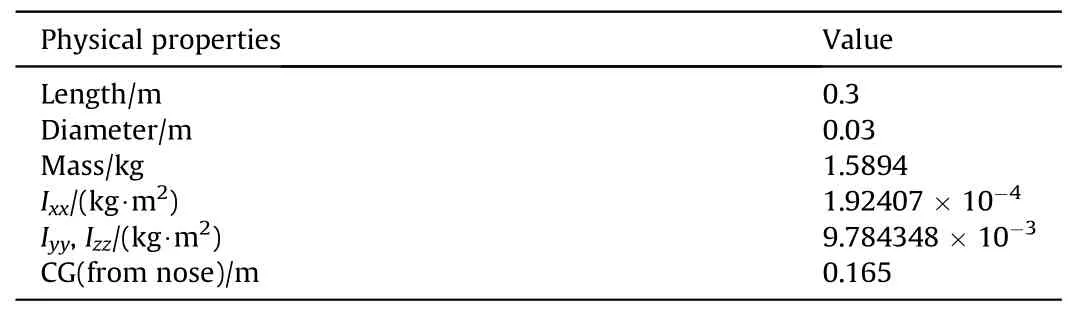
Table 1 Physical properties of the basic finner projectile model.
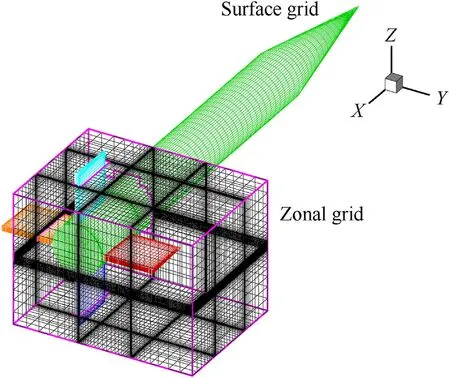
Fig.6.Grid of the basic finner projectile.
properties of the basic finner projectile model is shown in Table 1.
3.2.Test case
We chose the Defence Research Establishment Valcartier(DREV)Aeroballistic Range test case[27,28]to verify the accuracy of the numerical method described above.The initial velocity is 345 m/s and the flight height is 0 km.The initial euler angle is zero and the initial angular velocity (roll, yaw, pitch) is (-1.75, 0.6807,3.5) rad/s.
A structured overset computation mesh was generated for the projectile as seen in Fig.6.In general, most of the grid points are clustered in the boundary-layer, fins, and the wake regions.The boundary layer spacing near the wall was selected in order to
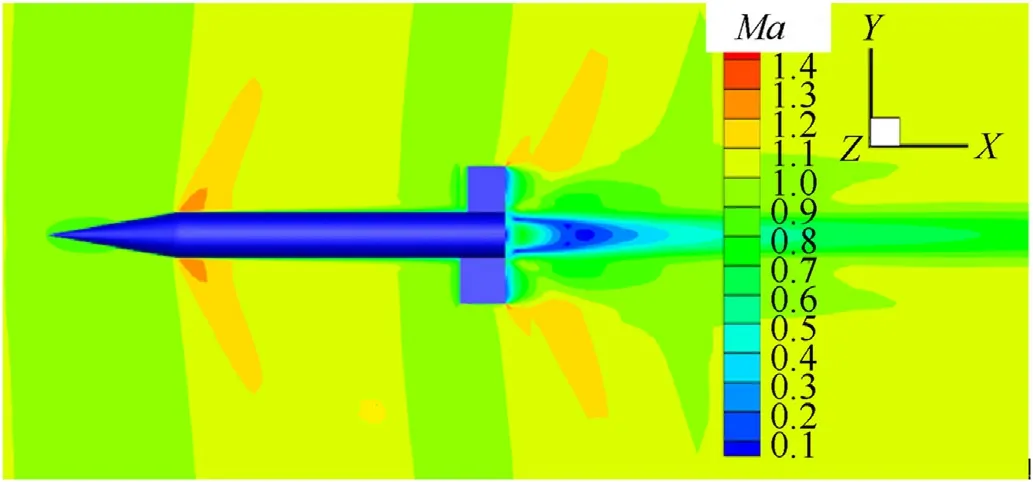
Fig.7.The Mach number contour of the initial flow field (Z = 0).

Fig.8.The history of pitch angle vs.range.

Fig.9.The history of yaw angle vs.range.
The results are shown in Figs.8 and 9.At 0 < Range <200 m,with the increase of flight distance, the pitch angle of the basic finner projectile exhibits an oscillatory convergence trend,and the convergence value is close to the initial angle of attack(1.018°).The amplitude of the yaw angle increases first and reaches the maximum amplitude of about 1.0°near the flight range of 130 m.The calculation results are in good agreement with the experimental data.It proves that the CFD/RBD coupled method is feasible,and has the ability to simulate the complex motion of the subsequent numerical virtual flight simulation with intelligent control.
4.Pitching simulation of the basic finner projectile
Based on the CFD/RBD coupled numerical virtual uncontrolled flight simulation algorithm established above, the traditional PID controller and the BP neural network PID controller are respectively used to construct the pitch angle tracking system of the basic finner projectile, and the numerical simulations of the longitudinal pitch motion of the basic finner projectile with closed-loop control are carried out.With reference to the dynamic performance indexes of the second-order damping system, including overshooting σp,transition time ts, steady-state error e, etc., the performances and effects of the intelligent PID controller based on BP neural network are verified and evaluated.
4.1.Traditional PID controller
The traditional PID controller uses the empirical trial and error method based on the linear model to adjust the PID parameters,which constitutes the closed-loop pitching attitude stability control system.The specific PID control parameters are shown in Table 2,and the control period of the numerical virtual flight simulation is 1 ms.
The free stream Mach number is 1.58, the flight height is 0 km and the initial attitude angles[γ,ψ,θ]are[0,0,5]°.The initial angular velocities [ωx,ωy,ωz] are [0 0 0] rad/s.The rudder deflection angle limiter within ±20°.
Firstly, the free release of the pitch channel of the projectile without control and with the traditional PID closed-loop control are simulated respectively.As seen in Fig.10, after the projectile is released from the initial pitch angle θ of 5°, the pitch angle converges to ±0.10°(2% of the initial pitch angle) after about 1.269 s without control.The result shows that the projectile has the static stability.With the addition of conventional PID closed-loop control,the pitch angle can be stabilized to 0°more quickly, and the time can be reduced from 1.269 to 0.338 s.The rapidity and stability of the system has been improved.The control surface deflects fast at the initial 0.01 s and the deflection (δ) amptitude reached nearly 10°.
Secondly, three kinds of pitch angle desired input are designed in this paper, and numerical virtual flight simulations of projectile pitch attitude angle tracking control are carried out respectively.The specific input conditions are as follows.
1) Step Input I:
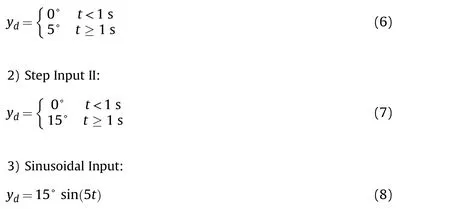
Figs.11 and 12 shows the numerical virtual flight simulation results of tracking control for two types of step pitch input respectively.For step input I, under the action of traditional PID controller, the overshoot of pitch attitude response is 17.04%, therise time is 0.091 s,the adjustment time(±2%of the desired value)is 0.515 s,and the final steady-state error is about 0.46%.The control surface deflects sharply at the initial 0.01 s and the deflection amplitude reached over 10°.After that, the deflection amplitude reached nearly 6.5°at 1.2 s and then diminished gradually.For step input II, The overshoot of pitch attitude response is 13.40%, the rising time is 0.089 s,the adjusting time is 0.562 s,and the steadystate error is about 0.38%.Under the control of the same PID parameters, the angle of attack increases with the increase of pitch angle at the beginning stage, and decreases gradually when the pitch Angle becomes stable to the expected value.When the expected value of pitch angle changes from 5°to 15°,the percentage of overshoot decreases, the adjustment time increases, and the steady-state error decreases.Moreover, a “small depression” appears at the peak of the pitch angle (the angle of attack is greater than or equal to 16°),at which time the characteristic parameters of the controlled object have changed.

Table 2 The Parameters of traditional PID controller.
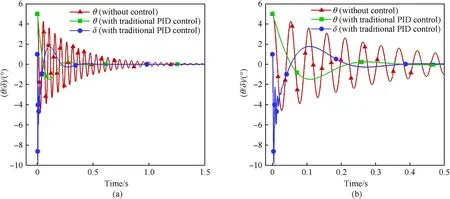
Fig.10.The history of pitch angle with time after released.
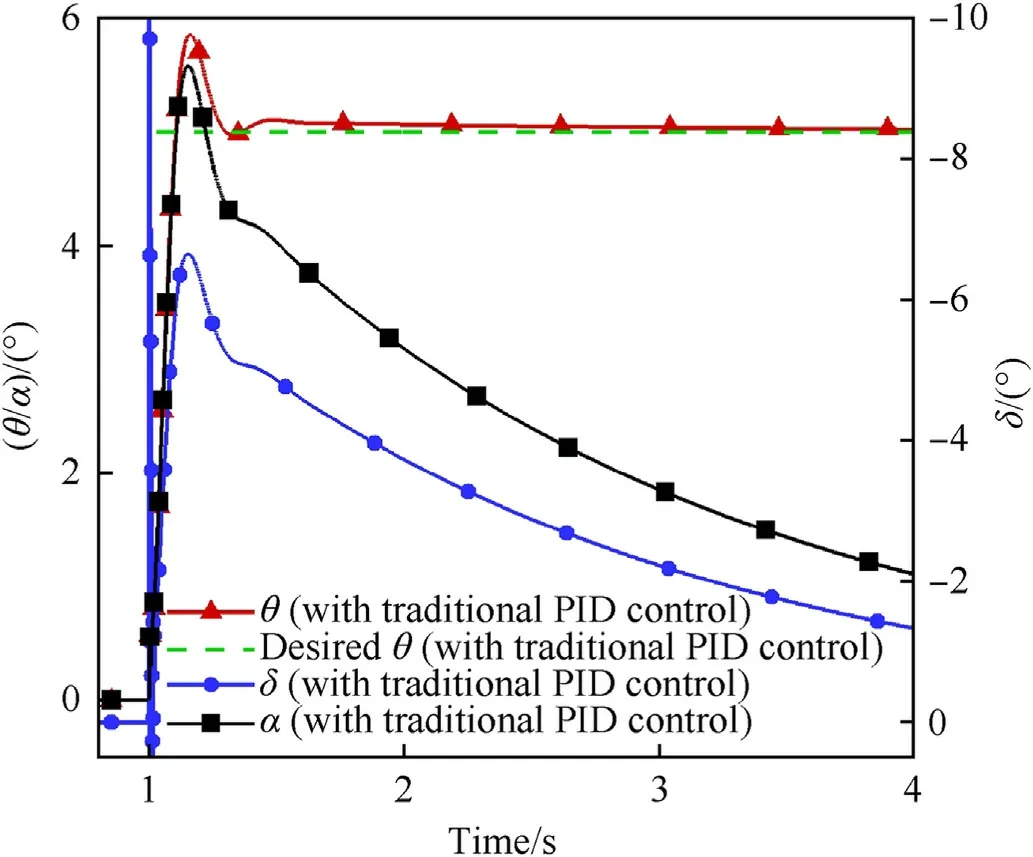
Fig.11.The control effect of 5° step input with traditional PID controller.

Fig.12.The control effect of 15° step input with traditional PID controller.
For sinusoidal pitch angle input, the results is shown in Fig.13.The traditional PID controller can track the sinusoidal pitch angle input.Compared with the expected value, the maximum tracking deviation is about 0.54%, and the peak response delay time of the system is 0.046s.
The above calculation results show that the traditional PID controller can achieve the desired control effect for the quick and stable control of the pitch angle free releasing and the tracking control of the step/sinusoidal input.However, in the specific application, in order to achieve the ideal control effect, the PID controller parameters need to be adjusted repeatedly to improve the system performance, which depends heavily on the engineering experience of the designer,which is not conducive to the rapid design of the control system.
4.2.BP nueral network PID controller
BP neural network has the ability to approximate any nonlinear function.When it is applied to the design of PID control system,it can realize the automatic combination of PID optimal parameters by intelligent learning of system performance.In this section, BP neural network based on machine learning is adopted to establish the neural network PID intelligent control of Kp, Kiand Kdparameters self-learning,so as to achieve the purpose of self-adjustment and optimization of PID parameters, and realize the projectile numerical virtual flight simulation algorithm based on PID intelligent control.The following examples are used for verification and evaluation.
The unsteady physical advance time step used in the simulation is 1 ms,the number of internal iteration steps is 20,and the control period of the control system is 1 ms.The free stream Mach number is 1.58,the flight height is 0 km and the initial attitude angles[γ,ψ,θ]are[0,0,5]°.The initial angular velocities[ωx,ωy,ωz]are[0 0 0]rad/s.The rudder deflection Angle limiter within ±20°.The number of hidden layer nodes of BP neural network is set as 5, the learning efficiency is 0.3,and the inertia coefficient is 0.3,The design result of traditional PID controller is used as the initial sample parameter of intelligent PID controller.

Fig.15.The control effect of 5° step input with different PID controller.
Firstly, the flight process of the projectile after its free release from the initial 5°pitch angle is simulated.As can be seen from Fig.14, after adding the BP neural network PID intelligent control,the basic finner projectile is released freely from the initial 5°pitch angle and gradually converges and stabilizes to ±0.10°(2% of the desired value) after about 0.080s.Compared with the traditional PID control, the stabilization time is only 23.7% of the traditional PID control.
For the three types of pitch angle desired value input given in Eqs.(6)-(8), the numerical virtual flight algorithm based on the intelligent PID control strategy established in this paper is used to carry out the tracking control virtual flight simulations of different pitch angle input.
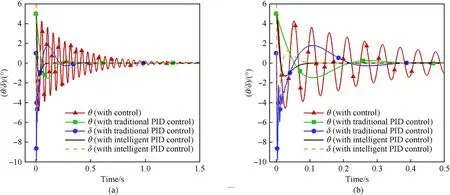
Fig.14.The history of pitch angle with time of different controller after released.

Fig.16.The changes in the values of the three control parameters over time.
For the step input I, Fig.15 shows the numerical virtual flight simulation results with the addition of intelligent PID controller.The overshoot of the pitch attitude response is only 0.78%,the rise time is 0.034 s,the adjustment time(±2%)is 0.05 s,and the steadystate error is about 0.16%.Fig.16 shows the change of the control parameters Kp, Ki, Kdduring the process.The Kpcoefficient converges to 0.193 after about 1.25 s.And the Kicoefficient converges to 31.5 after about 1.25 s.However,the Kdcoefficient has little change(<0.017%) as a whole.
For step input II,the results are shown in Fig.17.The overshoot of pitch attitude response is 1.11%, the rise time is 0.067 s, the adjustment time is 0.089 s (±2%), and the steady-state error is about 0.12%.Tables 3 and 4 further show the comparison of the control effect between the traditional PID controller and the intelligent PID controller when the two kinds of step pitch angle input.Compared with the traditional PID controller,the intelligent PID control strategy based on BP neural network learning, the overshoot, rise time, transition time and steady-state error of the control system have been significantly improved.In addition,when the expected pitch angle is changed from 5°to 15°, the intelligent PID control algorithm also shows good adaptability.
For sinusoidal input, the numerical simulation results with the addition of BP neural network intelligent PID controller are shown in Fig.18.The maximum deviation of BP-PID controller for sine pitch angle tracking is about 0.3%,and the peak response delay time of the system is 0.017 s.Compared with the control effect of traditional PID controller, the maximum deviation is reduced by 0.24%,and the peak response delay time of the system is reduced by 0.029 s.
In order to study the influence of different learning efficiencies(Xite) on BP neural network PID control, three learning efficienciesof 0.1,0.3 and 0.9wereselectedfor research,andtheunified input was5°step input.The numerical simulationresults are shown in Fig.19.On the whole, the control effect of different learning efficiencies is small,but the higher the learning efficiency,the faster the system,the larger the overshoot,and the smaller the stability error.
At the same time, for the sake of studying the influence of different inertia coefficients(Alfa) on BP neural network PID control, We select three inertia coefficients of 0.1, 0.3 and 0.9 for research, and the unified input was also 5°step input.The numerical simulation results are shown in Fig.20.Globally,the control effect of different inertia coefficients have little difference, but the higher the inertia coefficient, the faster the system, the larger the overshoot, and the smaller the stability error.
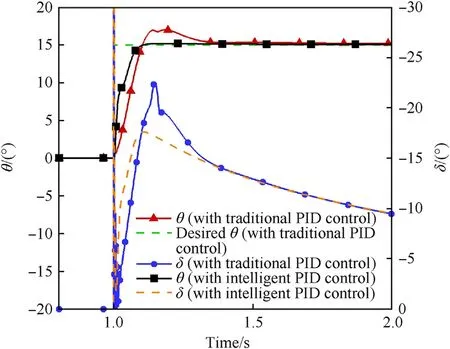
Fig.17.The control effect of 15° step input with different PID controller.

Table 3 The control performance of 5° step input with different PID controller.

Table 4 The control performance of 15° step input with different PID controller.

Fig.18.The control effect of 15° sinusoidal input with different PID controller.
The numerical virtual flight algorithm of BP neural network intelligent PID control is used to simulate the rapid and stable flight of the pitch angle after free releasing, and the step and sinusoidal pitch angle tracking flight state.The results show that the intelligent PID controller has achieved a good control effect.Compared with the traditional PID controller, the performance indexes have been significantly improved.And the workload of manual intervention is greatly reduced.Different learning efficiency and inertia coefficient will also affect the control performance of BP neural network intelligent PID controller.Under different input conditions,especially the attitude tracking under the condition of 15°pitch angle,local nonlinearity has appeared in the pneumatic,BP neural network intelligent PID controller can also achieve satisfactory control effect and has good generalization ability.
From the perspective of engineering practicability, the final convergent intelligent PID parameters obtained based on numerical virtual flight simulation can also provide a reference for the design and selection of traditional PID controller parameters,reduce the dependence of manual experience and improve the design efficiency.
5.Conclusions
Numerical virtual flight technology has the ability of multidisciplinary integrated coupling simulation such as aerodynamic/flight mechanics/control, which can be used to check the stability and control law of aircraft under nonlinear conditions, and can be applied to the actual projectile design,providing technical support for flight test safety,ballistics and control system design.Based on the optimization design requirements of controller parameters in the numerical virtual flight technology, this paper carries out the design of intelligent PID controller based on machine learning, realizes the real-time,online learning and intelligent optimization of controller parameters in the process of the virtual flight, verifies and evaluates the algorithm based on the Basic Finner projectile model.The result of research shows below.
1) Based on the numerical virtual flight algorithm proposed in this paper, the virtual simulation of free flight without control and the analysis of the dynamic characteristics of the projectile are realized.The comparison with the experiment shows that the proposed algorithm can obtain the results consistent with the real projectile flight data, which can be used for auxiliary verification of the real test parameters and provide an important basis for the control parameter setting in the design of the projectile control system.
2) A numerical virtual flight simulation algorithm based on intelligent PID control is proposed and implemented.The simulation results show that,compared with the traditional PID control,the intelligent PID control algorithm based on BP neural network has better control effect, and various performance indicators such as overshoot, rise time, transition time and steady-state error have been greatly improved.The higher the learning efficiency or the inertia coefficient,the faster the system,the larger the overshoot,and the smaller the stability error.It shows good adaptability to different input conditions
3) The numerical virtual flight technology based on machine learning intelligent control can closely combine the aerodynamic, ballistic and intelligent control systems, give full play to the nonlinear influencing factors of their respective disciplines, and to a greater extent consider the coupling nonlinear effect between various disciplines, changing the previous deficiency of"separate,non-interference".It can provide a new way and means for the comprehensive evaluation of the overall performance of future aircraft.
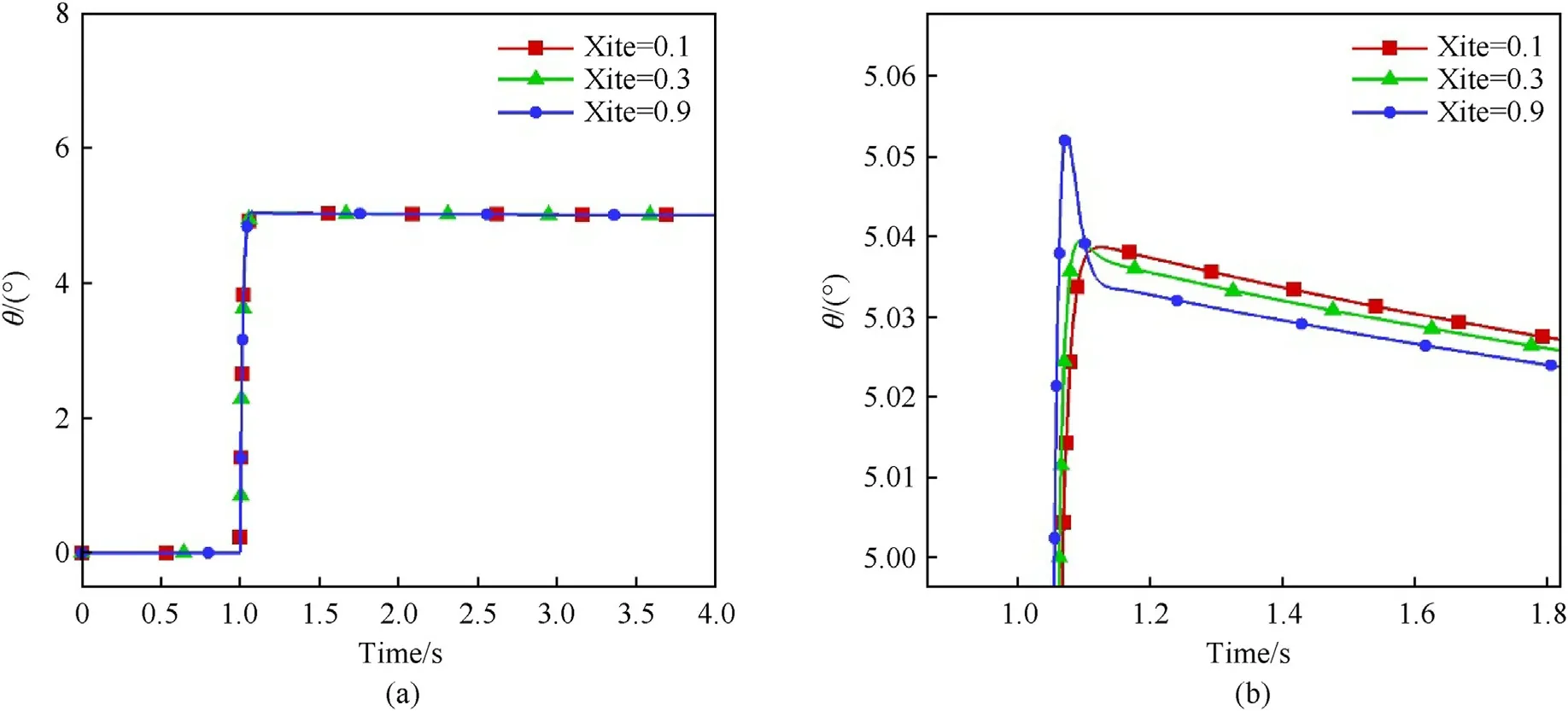
Fig.19.The control effect of 5° step input with learning efficiency.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.

- Defence Technology的其它文章
- Ground threat prediction-based path planning of unmanned autonomous helicopter using hybrid enhanced artificial bee colony algorithm
- Layered metastructure containing freely-designed local resonators for wave attenuation
- Predicting impact strength of perforated targets using artificial neural networks trained on FEM-generated datasets
- Construct a 3D microsphere of HMX/B/Al/PTFE to obtain the high energy and combustion reactivity
- Ignition processes and characteristics of charring conductive polymers with a cavity geometry in precombustion chamber for applications in micro/nano satellite hybrid rocket motors
- Recent research in mechanical properties of geopolymer-based ultrahigh-performance concrete: A review