
Filtered High Gain Observer for an Electric Vehicle’s Electro-hydraulic Brake: Design and Optimization Using Multivariable Newton-based Extremum Seeking
2024-01-16 07:47-,,
-,,
(1.ENSEM,Hassan II University of Casablanca,Casablanca BP 8118,Morocco;2.ENSAM Rabat,Mohammed V University,Rabat BP 6207,Morocco;3.Department of Electrical Engineering,University of Caen Normandy,Caen 14032,France)
Abstract: Designing high-gain observers (HGOs) for the state estimation of an electric vehicle’s electrohydraulic brake (EHB)system is challenging.This type of observer is applicable to model nonlinearities and constant feature gains.However,they are very sensitive to measurement noise,which is unavoidable in EHB.The first novelty of this study is that it compensates for the measurement noise using a filtered high-gain observer (FHGO) to ensure EHB state estimation.The proposed FHGO provides an estimate of the master cylinder pressure,motor current,and rotor speed from measurements of the rotor position.The second novelty is the design of an extremum-seeking (ES) optimization loop to adjust the FHGO gains online.The performance of the developed FHGO with ES-based online gain optimization was highlighted in the presence of model uncertainties and output measurement noise using a Matlab/Simulink simulation.The superiority of the FHGO (even with a fixed gain) over a standard high gain observer(SHGO) was also demonstrated.
Keywords: Electrohydraulic brake,filtered HGO,measurement noise,optimization,extremum-seeking,Lyapunov theory
1 Introduction1
The severity of environmental pollution and the energy crisis have prompted greater focus on the research and development of electric vehicles (EVs) in many countries.Modern EVs are equipped with friction and regenerative braking systems to achieve better braking behavior and energy regeneration[1-2].Electrohydraulic brakes (EHB)are superior to conventional hydraulic braking systems in terms of response time and performance.The EHB method described in Refs.[3-4] is the focus of this study.It consists of a DC electric motor-driven linear motion mechanism that presses the master cylinder directly to develop hydraulic pressure (Fig.1).
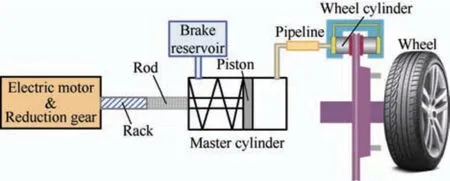
Fig.1 EHB schematic diagram
In EHB operation,state variables such as the rotor position and master cylinder pressure are key information[5].The EHBs are equipped with sensors to measure these variables.Obviously,the failure of one or more sensors leads to the malfunctioning of the EHB and possibly vehicle damage.One solution to make the EHB more reliable is to duplicate all the sensors.However,this approach is expensive and cumbersome.Furthermore,sensor measurements are very noisy in the present context.To overcome these limitations,we seek an alternative solution that consists of implementing a state observer instead of duplicating sensors.Thus,we reduce the cost of the EHB while preserving the reliability of the duplicated solution.Moreover,the observer-based solution was significantly less sensitive to noise.
Compared with conventional hydraulic brakes,EHBs have been addressed much less in the control literature.The control design for these systems has been addressed using a proportional-integralderivative (PID) controller[6]and sliding mode controller[4,7].In Ref.[8],the observer design for EHB was considered in the framework of output-feedback control.The proposed observer incorporates a simple estimator for hydraulic pressure in the EHB,neglecting any measurement noise or uncertainties in the model.
This study focuses on the observer design for an EHB system using the high-gain observer (HGO)design technique.HGOs feature a constant gain,making them simpler than varying-gain observers.However,its constant-gain nature raises the issue of selecting a gain value.Indeed,large gain values ensure rapid estimation error convergence in the absence of measurement noise.In the presence of noise,high gains amplify the effect of measurement noise and may deteriorate the stability of the observer.Another drawback of using a large gain value is peaking phenomenon[9].Therefore,research on the design of filtered high-gain observers has been a long-standing issue[10-13].Therefore,this study proposes a filtered high-gain observer (FHGO) for EHB systems.Design and stability analysis of FHGO using the Lyapunov theory are presented in this study.As will be proved later,the stability and convergence rate of the FHGO depend on the careful tuning of two parameters.To ensure good performance of the proposed observer,rather than manually choosing the tuning parameters of the FHGO,a real-time optimization of the two parameters was performed using the extremum seeking (ES) algorithm[14-16].To address these issues,the following contributions were made.
(1) EHB model accounting for measurement noise.The proposed FHGO model considers measurement noise and estimates the rotor speed,motor current,and master cylinder pressure based solely on the measurement of the rotor position.This study considers the measurement noise overlaid on the measurable state throughout its development.
(2) Observability analysis.To ensure that the state variables of the EHB could be estimated,the observability property of the EHB was analyzed.Subsequently,a coordinate change by diffeomorphism to a uniformly observable form of the EHB model was performed to obtain a straightforward design for the FHGO.
(3) Standard high gain observer (SHGO).For pedagogical purposes,the SHGO (without a low-pass filter) for the EHB model in the presence of measurement noise was first designed.This design provides interesting insights into the filtered version of the design proposed later in this study.
(4) Filtered high-gain observer.The main contributions of this study are the design,stability analysis,and performance evaluation of the FHGO for EHB.The primary concept of the proposed FHGO is that a low-pass filter filters the output injection term before it is reinjected into the EHB observer.Thus,the asymptotic behavior of the proposed observer is preserved even in the presence of measurement noise.
(5) Online extremum seeking (ES) optimization of FHGO parameters.The choice of FHGO tuning parameters has proven to be complex.For simplicity and optimal tuning of the FHGO,the observer parameter selection problem was transformed into a real-time optimization problem using the ES.
The remainder of this paper is organized as follows.Section 2 describes the proposed EHB model.A problem statement is presented in Section 3.The EHB observability analysis,model transformation into a uniformly observable form,FHGO design,and stability analysis are explored in Section 4.In Section 5,online ES optimization of the FHGO tuning parameter is described.The performance validation of the proposed FHGO for the EHB model is highlighted through simulations using Matlab/Simulink in Section 6.
2 EHB modeling
In this section,we develop a mathematical model for the EHB[6,17].As shown in Fig.1,the EHB consists mainly of an electric motor,worm gear,rack and pinion mechanism,master cylinder,braking pipe,and wheel-cylinder mechanism.Models of the electrical,mechanical,and hydraulic subsystems are derived in the following subsections.
2.1 Electro-mechanical subsystem modeling
The DC motor can be modeled using a circuit with an ideal voltage generator that describes the back electromotive force (EMF) connected in series with an inductor and a resistor.The equations for the electrical system model are as follows
whereuis the motor voltage;iis the motor current;eis the back EMF;Jis the total moment of inertia of the motor and reduction gear;mωis the motor speed;Tmis the motor torque;Tlis the load torque owing to the master cylinder pressure;andkdampis the motor damping coefficient.L,R,andkeare the inductance of the motor,motor resistor,and back-EMF constant,respectively.
The dynamics of the mechanical part of the master cylinder can be described as follows
wheremmcis the mass of the master cylinder piston;xmcis the position of the master cylinder piston;Flis the force acting on the piston;mθis the rotor position;andgris the ratio of the total reduction mechanisms.pmcis the pressure in the master cylinder andAmcis its area.
Assumption 1: Acceleration element with mass in Eq.(3) can be eliminated owing to the minimal contribution of the inertial force of the master cylinder piston.Subsequently,Eq.(3) can be simplified as follows
With the above assumption and using Eq.(4),Eqs.(2)and (4) can be expressed as follows
2.2 Hydraulic subsystem modeling
The hydraulic subsystem modeling is discussed in this section.Using the theory of mass conservation,the dynamics of the master cylinder and wheel cylinder pressures are derived as follows
whereβis the bulk modulus of the brake fluid;Vmcis the volume of fluid inside the master cylinder chamber;qmcis the volumetric flow rate running out of the master cylinder chamber;smcis the master cylinder piston stroke;pwcis the wheel cylinder pressure;Vwcis the volume of fluid in the caliper chamber;qwcis the volumetric flow rate into the wheel cylinder;Aw cis the area of the wheel cylinder piston;andkwcis the pad stiffness.
Applying Newton’s second law to the wheel cylinder piston,the equation of motion is given as follows
wheremwc,xwc,andxgaprepresent the pad mass,position of the wheel cylinder piston,and air gap between the brake pad and brake disk,respectively.
Assumption 2: Owing to the small contribution of the inertial force of the wheel cylinder piston,acceleration with mass can be discarded,and Eq.(10)becomes
Assumption 3: Ignoring pipeline dynamics and assuming linear flow,the hydraulic pressure drop in a circular pipeline can be expressed as follows
By using Eqs.(10)-(12),Eq.(8) and Eq.(9) can be rewritten as follows
2.3 Observer design model of the EHB
According to Ref.[5],the propagation dynamics of the brake pressure waves were ignored.In other words,the master cylinder pressure was equal to the wheel cylinder pressure (pmc=pwc).Therefore,the wheelcylinder dynamics in Eq.(14) can be disregarded.
Let the state vectorx=[x1x2x3x4]T=[θ mωmi pmc]T.The state representation of the EHB model (Eqs.(1),(7),(13)) can be expressed as follows
whereh(x)=x1,n(t)∈R is the measurement noise of the measurable state1xandu∈R is the system input.
3 Filtered high-gain observer for EHB
3.1 Problem statement
The proposed state observer estimates the EHB state from the measurements of the motor voltageu(the input) and rotor positionmθ(the output),which are easily measured using an incremental encoder,often coupled with the rotor and gearbox.Unlike the extended Kalman observer,whose convergence is not guaranteed in general,and the sliding mode observer,which is subject to the chattering problem,the more efficient HGO is adopted in this study.HGO is very sensitive to measurement noise.Thus,we opted for filtered HGO in the EHB system in this study.
In SHGO (without a filtering action),the output correction term(y-) was reinjected directly into the EHB observer (Fig.2).However,in the proposed FHGO,the idea is to filter the output injection term using a low-pass filter before reinjection into the observer (Fig.3).Thus,the asymptotic convergence of the estimation error is always preserved,even in the presence of measurement noise.

Fig.2 Standard high-gain observer scheme
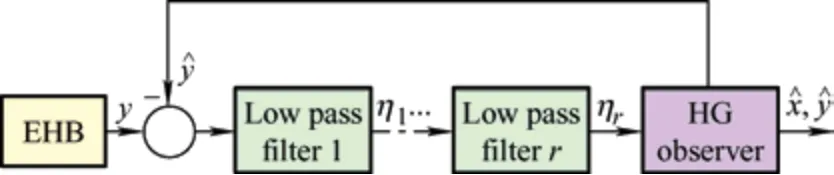
Fig.3 Filtered high-gain observer scheme
As shown in the next section,for a given low-pass filter orderr,the stability and convergence rate of the FHGO depend on careful tuning of two parameters.To guarantee good performance of the proposed observer,rather than manually adjusting the FHGO tuning parameters,real-time optimization of the two parameters by the ES algorithm was performed according to Fig.4.

Fig.4 Block diagram of the optimized FHGO
3.2 EHB observability analysis
Before designing the FHGO for the EHB model,it is necessary to analyze the observability of the system.An observability rank condition method based on the Lie derivative is used.Let the vector
whereΟ(x)is a mapping that constitutes the observation space,andL fh(x) is the Lie derivative ofh(x) with respect to the vector fieldf(x)=[f1(x),f2(x),f3(x),f4(x)]T.
Proposition 1: Consider system in Eq.(15).The Jacobian of matrixO(x) is full rank,regardless of the statexvariation.Thus,this system is observable almost everywhere.
Proof of Proposition 1.The observability of EHB can be assessed using the Jacobian ofO(x).Applying the Lie derivative to Eq.(15),the matrixO(x) is obtained as follows
The Jacobian ofΟ(x)is expressed as follows
Clearly,the determinant of matrixJc(x)is the following square matrix
By replacingH3andH4with their expressions,we obtain
It is clear that:det(Jc(x)) ≠ 0,?x∈R4.This concludes the proof of Proposition 1.
3.3 Transformation to uniformly observable form
The EHB model is observable almost everywhere.A change in the coordinates can then convert it into a uniformly observable form[18].This form allows for an easy and straightforward design of a high-gain observer.
Proposition 2: Consider the system in Eq.(15),it exists a diffeomorphismφ(x) defined as follows
φ(x) transforms the system in Eq.(15) to a uniformly observable form expressed as follows
where the matricesA,Candφ(u,z) are given by the
Proof of Proposition 2.Letz1=x1be the system output.From Eq.(15),the derivative of1zis
According to Eq.(16),the dynamics ofz2can be written as
Similarly,the derivative of3zis obtained using Eq.(16) as
Using Eq.(16) and Eq.(27),the derivative ofz4is given as follow
Notice that from Eqs.(25)-(28),we can easily check the anti-shift form of matrixAand the triangular structure of the vector functionφ(u,z).This result demonstrates that the canonical observability form of Eq.(24),and thus ends the proof of Proposition 2.
Remark 1: The originalx-coordinates can be easily deduced from thez-coordinates as follows
3.4 FHGO for EHB in the presence of measurement noise
To make the observer design and analysis more realistic,the model developed in the previous subsection was augmented with measurement noise.Specifically,the EHB model can be rewritten as
wheren(t) is the output measurement noise,which is assumed to be bounded,and its upper bound is denoted asδn> 0.MatricesA,C,andφ(u,z) are defined in Proposition 2.
In the following,some definitions,notations,and assumptions are required for the convergence analysis of the observation error of the proposed observers.
λmin(·) (resp.λmax(·)) denotes the smallest (resp.largest) eigenvalue.We define the diagonal matrixΔθ=,withθ≥ 1 as the scalar design parameter.Note that one can verify the following identities without difficulty
Assumption 4: The statez(t) is bounded,and a bound of it denotedzρis known.
The angular position of the motor shaftθm=1z,angular speedωm=z2,current of the motori∝z4,and master cylinder pressurepmc∝(z3+z4)are practically bounded.Then,Assumption 4 holds.
Property 1: Based on parameter values listed in Tab.1 and thatz1∈[0,2π],there exists?>0?t,Gsmc-z1(t)>?.Consequently,the functionsφiof the vector functionφ(u,z)are Lipschitz on the following convex compact set
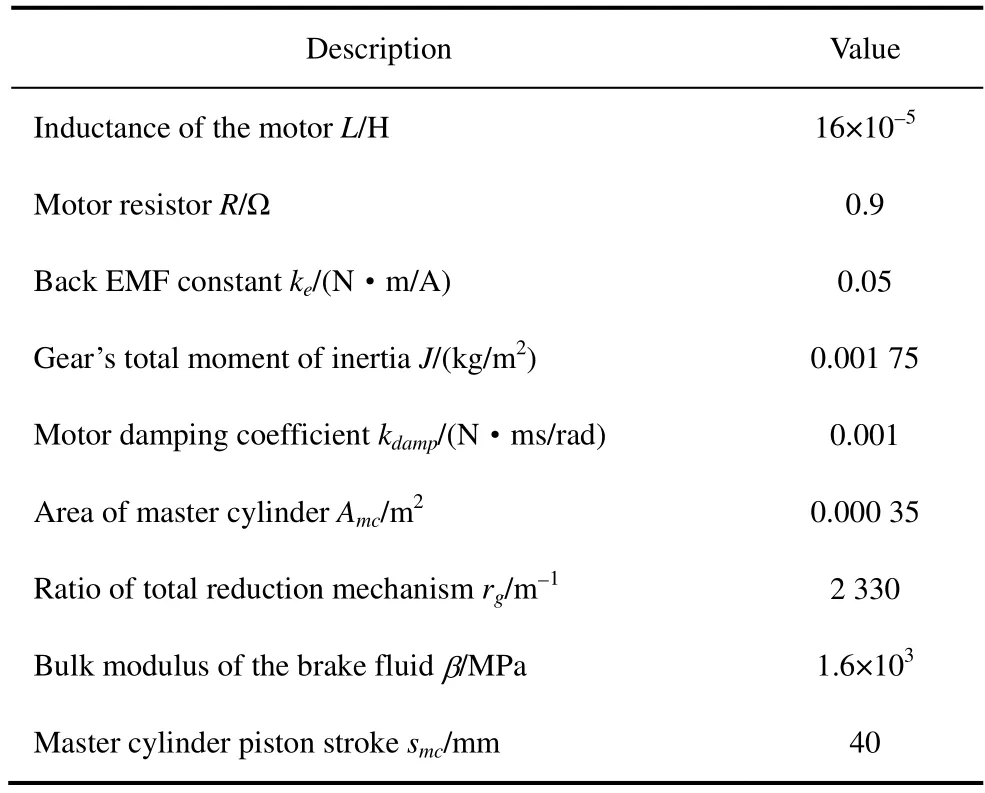
Tab.1 EHB model parameter numerical values
3.4.1 SHGO for EHB in presence of measurement noise In this subsection,the SHGO for EHB in the presence of measurement noise was designed for pedagogical purposes.This sheds light on the filtered-version design proposed in this study.The SHGO is represented by the block diagram in Fig.2.
Considering the system EHB in thez-coordinates of Eq.(29),the following system Eq.(31) is the HGO of Eq.(29).
wherez?∈R4is the state estimate ofz,the mapping?(·) denotes the orthogonal projection onΩ,andK=(k1,k2,k3,k4)Tis any vector such that the matrixA-KCis Hurwitz.Since the matrixA-KCis Hurwitz,there exists a 4 × 4 SPD matrixPsuch that
The estimation error was introduced ase=(e1,e1,e3,e4)T=-z.Subsequently,we obtain the following result.
Proposition 3: Assume that the EHB system in Eq.(29) satisfies assumption 4: A real scalar0θexists such that forθ>θ0,Eq.(31) holds,and is the global exponential observer for the system in Eq.(29) in the sense that
Proof of Proposition 3.Defining the estimation error ase=(e1,e1,e3,e4)T=-z,its dynamics are given by
Let introduce coordinate changes
Using Eq.(30),it is verified that the new erroris governed by the following equation
Using Assumption 4 and the triangular structure of the vector functionφ(u,z),we apply the mean-value theorem
where ? is a positive real constant that does not depend on theθ(θ≥1).
By using Eq.(30),one has
By combining Eqs.(37)-(39),we obtain
Letθbe sufficiently large enough so that 2(θ-?λmax(p))>θ,that is,θ>θ0=2?λmax(P) >0.
It can be easily verified that Eq.(41) implies
By applying the comparison lemma[19],we obtain
which yields
whereσ=
From Eq.(33),it is seen that ifδn=0 (absence of measurement noise),the observation error converges exponentially to zero for a large enoughθ.In practice,measurement noise is generally present,making high values ofθhighly problematic.Indeed,inequality Eq.(33) shows that the mapping “measurement noise →estimation error” is input-to-state stable with a gain proportional to3θ.Therefore,high values ofθlead to larger estimation error.
To better analyze the asymptotic behavior of the estimation error,the measurement noise was modeled using a finite Fourier series
whereN>0 is any positive integer,the parameter 0<ε?1 shifts the base frequenciesωsito high frequencies (for sufficiently smallε,the measurement noise Eq.(45) exhibits high-frequency behavior).The real quantitiesni> 0 and?idenote the amplitude and phase of each component,respectively.Using these notations,the steady-state estimation error is bounded as follows
3.4.2 FHGO for EHB: Design and analysis
To overcome the performance limitations of the SHGO,we will design and analyze an FHGO for the EHB model.As shown in Fig.3,the output-injection term was filtered using a low-pass filter before being reinjected into the EHB observer.Thus,the asymptotic behavior of the resulting observer in the absence of measurement noise is preserved in the presence of measurement noise.
The FHGO of the system in Eq.(29) is defined as follows
whereη(0)=0 and arbitraryz(0)∈Ω,and(0)∈R4,wherer∈Z*+is the relative degree of the low-pass filter.The filter is parameterized by the high-gain parameterθof the observer and a second parameterκ> 0.The vectorG=(G1,G2,G3,G4)Tis arbitrarily selected such thatA-GCis a Hurwitz vector.
MatricesAr,Br,Cr,andηare defined as follows
We define the transformed state-estimation error as=Δθe=Δθ(-z).Assuming thatθvaries slowly such that its derivative is neglected,it follows from Eqs.(29),(30),and (47),is governed by the following equation
Let introduce the augmented state vectorξ=,ηT]T.It follows from Eqs.(47) and (48) that this vector can be expressed as follows
AsA-GCis Hurwitz,it follows that for anyr∈Z*+,there existsκ0>0 such that for eachκ∈[0,κ0],F(κ)is Hurwitz.Therefore,there exists an SPD matrixQsuch that
The main results of this study are as follows.
Theorem 1: Consider FHGO in Eq.(47) to the EHB model in Eq.(29),subject to Assumption 4 and Property 1.There existsκ0>0 such that for eachκ∈[0,κ0],a real scalarθ0exists such that forθ>θ0,the observer of Eq.(47),when applied to the system in Eq.(29) yields the following
Proof of Theorem 1.Consider the Lyapunov candidate function
The derivative ofV(ξ) is as
Using Eq.(50),one has
According to Assumption 4,the triangular structure of the vector functionφ(u,z),the mean value theorem,and the identities in Eq.(30),we can verify that
where ? is a positive constant that does not depend onθforθ≥1 .
Using Eqs.(55)-(56) and the inequalitywe obtain
Eq.(58) can be rewritten as
Using the comparison lemma[19],we obtain
Using Eq.(52),Eq.(60) leads to
The results of Theorem 1 follow from Eq.(61),using the initial conditionη(0)=0 and the inequalitiesand.This completes the proof of Theorem 1.
In the case of a high-frequency measurement noisen(t) similar to Eq.(45),the steady-state estimationerror is bounded as follows[20]
It follows from Eq.(62) that with a judicious choice ofθandκaccording to Theorem 1,the norm of the estimation error converges to a neighborhood of zero.The convergence rate can be made arbitrarily high by tuningr(because of the termεr+1).Unlike the performance of the SHGO (Eq.(46)),the performance of FHGO (Eq.(62)) contains the termεr+1(withε≈0 used for high-frequency measurement noise).This term compensates for the negative effects of the
4 Online ES tuning of θ and κ
In the presence of high-frequency measurement noise,a key issue is how to select the parametersθandκof the FHGO observer of Eq.(47).On the one hand,θshould be large enough to ensure a fast convergence of the estimation error to zero (in the noise-free case);on the other,a large value ofθentails noise effect amplification on the state estimation error.A high value ofθmay also cause“peaking phenomenon” during the transient period.It turns out that the choice ofθshould meet a compromise between fast convergence rate,sensitivity to measurement noise,and peaking phenomenon.Furthermore,Eq.(62) shows that a high correlation exists betweenκ,θ,and the low-pass filter orderr.By Theorem 1,κshould not be too large.
Clearly,making a satisfactory a priori choice of the FHGO parameters is a complex task.Therefore,we sought the online tuning of these parameters.To this end,a real-time optimization problem involving observer parameters was defined and solved using an extremum seeking (ES) approach.One of the main features of this real-time adaptive optimization technique is its model-free nature.Here,a multivariable Newton-based ES was used (while maintaining a fixed LPF orderr) (Fig.5).The convergence rate in ES using Newton’s method is user-assignable and does not depend on the unknown Hessian of the cost function,unlike in gradient-based ES[14].
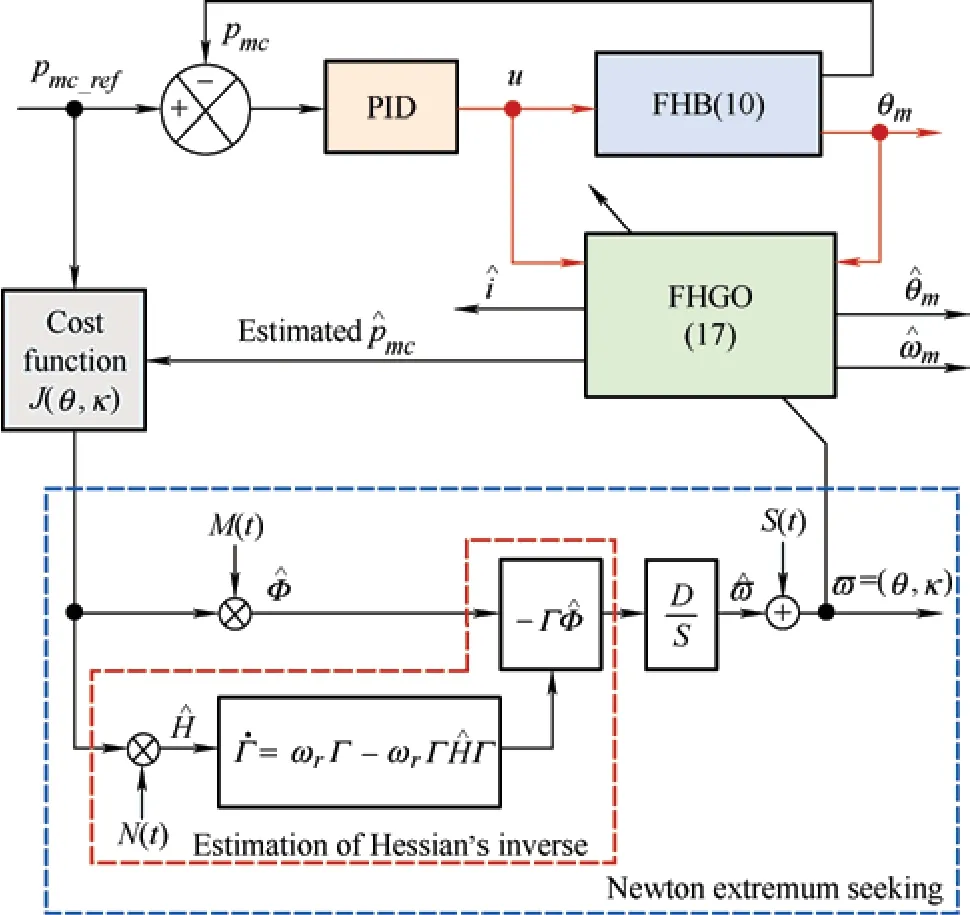
Fig.5 Schematic of Newton’s ES strategy for optimizing FHGO parameters
4.1 Cost function selection
The selection of a suitable cost function is crucial.One possible choice is the quadratic functione12=(-z1)2=(-θm)2.However,this function is only weakly sensitive to measurement noise.Indeed,Eq.(62) shows that the convergence to zero ofdoes not necessarily imply convergence to zero for other estimation errors.In fact,e4=-z4is most affected by the measurement noise and peaking phenomena (owing to4θin Eq.(62)).Based on these observations and Remark 1,the following cost function was considered
Because the master cylinder pressurepmcwas unmeasurable,it was replaced by the referencepmc_ref(Fig.5).A PID controller is used in a state feedback control to ensure thatpmctrackspmc_ref.
4.2 Multivariable newton-based ES
From Remark 1,Eq.(63) can be expressed as
Property 2: From Eq.(62) and according to Theorem 1,there exists an?*=(θ*,κ*)Tsuch that
whereHis the Hessian.
The perturbation signals and matrix (Fig.5) are defined as follows
whereadenotes a real number.The gainD=diag(d1,d2),frequenciesω1,ω2,andωrare chosen as follows
whereωandδare small positive constants,andare rational numbers,isO(1) positive constant,Dis a diagonal matrix withO(1) positive elements.
In Fig.5,the dashed part provides the Hessian estimation.Without this part,the optimization scheme reduces to the gradient-based ES.The demodulation by low-pass filtering of the product (J(?) -γ)N(t)gives the estimated.A direct inversion of the HessianHcan be problematic whenis close to singularity or to be indefinite.To get around this issue,the following Riccati equation is used to get an estimate of the inverse of.
The Riccati equation has two steady-state solutions,=02×2and.Owing toωr> 0,the first solution is unstable,whereas the second is locally exponentially stable (linearization of Eq.(75) aroundis the Jacobian-ωrI2×2).Thus,the Riccati equation converges to the real value of the Hessian matrix inverseH-1after the transient.
From Fig.5,the dynamics of the estimated??are given by
The Taylor series expansion of the cost functionJ(?) around?*yields the following second approximation
Considering Eq.(77),the average closed-loop system is expressed using the error variables=-?* and=Γ-H-1as follows
Linearizing the system of Eqs.(78) and (79) around the stable equilibrium leads to a linear approximation
Clearly,system Eq.(80) is exponentially stable because its eigenvalues are negative owing to Eqs.(73)-(74).The closed-loop system expressed in Eqs.(78)-(79) are locally exponentially stable,and the convergence rate is tunable through the parametersDandrω.
5 Simulation results
5.1 Simulation protocol
To validate the performance of the FHGO proposed in Eq.(47) to the EHB model in Eq.(29),simulation tests were performed using Matlab/Simulink with the sampling timeT=50 μs .The various parameters of the EHB model are given the numerical values of Tab.1.The gains of SHGO and FHGO are chosen such that the matricesA-KCandA-GCare Hurwitz matrices and are given the valuesK=G=(5,8,11,7)T.
Two simulation results are obtained to highlight the performance of the proposed FHGO in the presence of various noise signals.
For the results presented in Subsections 5.2 to 5.4,the measurement noise has been generated by considering Eq.(45) usingN=2,ε=0.001,=1,ωs2=,n1=0.15,andn2=0.25.It is the sum of two high-frequency sinusoidal signals.Fig.6 shows the noisy nature of the observer outputθm.

Fig.6 Noisy measurement of θm (sinusoidal type)
In Subsection 5.5,simulation tests are performed considering Gaussian noise with a variance of 0.000 5.In that case,the noisy measurements ofθmis shown in Fig.7.

Fig.7 Noisy measurement of θm (Gaussian type)
Note that for all simulation tests,the signalυ(t)=0.01cos(50t)has been added on the right-hand side of all dynamic equations of the EHB model of Eq.(15).The extra termυ(t) accounts for all model uncertainties including possible parameter variations and nonlinear friction forces in the mechanical and hydraulic parts,as Ref.[4].
For all simulations,the reference braking pressurepmc_refof the EHB was chosen to be variable over a 13 s cycle (and similarly forpmcowing to the control loop by PID).To demonstrate the effectiveness of the observer,thePmccycle was repeated more than twice during each simulation test.The states of the system and observer are initialized as followsωm-init=iinit=pmc-init=0,=5,=1,and=10.
5.2 Measurement noise effect on HGO
To highlight the need for an FHGO,the performance of SHGO in Eq.(31) is presented in this subsection.The simulation scheme is illustrated in Fig.8.The SHGO gainθwas set to 100 to avoid a slow convergence and high noise amplification.
The master cylinder pressurePmcand its estimates in the absence and presence of measurement noise are illustrated in Fig.9,which shows the negative effect of noise on the state estimation.Hence,FHGO must be used to compensate for the measurement noise.

Fig.9 SHGO performance: Master cylinder pressure pmc estimation in the absence and presence of measurement noise
5.3 Performance of the FHGO with fixed parameters
In this subsection,the FHGO performances with fixed parametersθandκare tested under the same simulation protocol.The simulation scheme is shown in Fig.8b.In order to obtain a fair comparison,theθparameter has been chosen to be equal to 100 as in the SHGO case.Based on several tests and according to Theorem 1,the appropriate numerical values ofκandrare given by 0.069κ=andr=3,respectively.
Fig.10 shows the master cylinder pressure and its filtered estimation.The impact of measurement noise on the asymptotic behavior of the estimation error was well mitigated.However,Fig.10 (zoom) shows that the transient period of the FHGO with fixed parameters suffers from a peaking phenomenon.
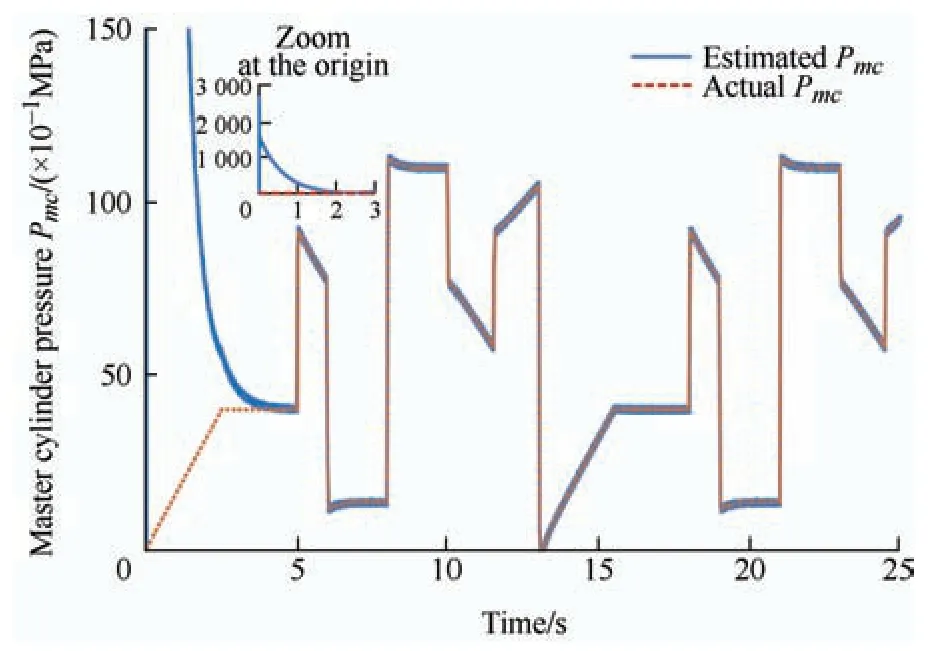
Fig.10 FHGO performance: Master cylinder pressure Pmc estimation
5.4 Performances of FHGO with ES optimization
The superior performances of the proposed FHGO in Eq.(47) for the EHB model in Eq.(29) with the ES optimization ofθandκare shown in this subsection.The measurement noise is considered to be a sinusoidal signal.A simulation test was also performed using the same protocol.The simulation scheme is shown in Fig.5.The parameterskP,ki,andkdof the PID-like controller used in the simulation were chosen using the Ziegler-Nichols method.The obtained values are 0.45,2.33,and 7×10-2.
The parameters of the Newton-based extremumseeking loop shown in Fig.5 are listed in Tab.2.The initial condition of the Hessian inverseΓ(0) is chosen to be symmetric and negative definite as[14]

Tab.2 Newton extremum seeking parameters values
The performances of the optimized FHGO are illustrated in Figs.11 and 12.Fig.11a shows that the noisy measurable statemθis well-filtrated and estimated by the FHGO,which is similar to that for the motor speedmωand motor currenti,as depicted by Figs.11b and 11c.The simulated master cylinder pressurepmcand its estimate are shown in Fig.11d.It can be observed thatpmcis well estimated and filtered,and unlike FHGO with fixed parameters (Fig.10),the FHGO with ES optimization is a peaking-free observer.The optimized gainθis given in Fig.12.

Fig.11 Performance of FHGO with ES optimization
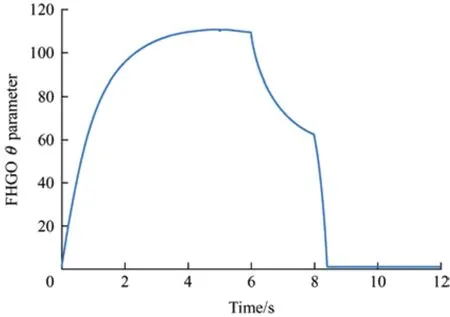
Fig.12 FHGOθ parameter optimization
5.5 Performance of the optimized FHGO in presence of Gaussian measurement noise
In this subsection,Gaussian noise with a variance of 0.000 5 is considered to demonstrate the capability of the proposed FHGO to achieve a good estimation performance despite varying measurement noises.A simulation test was also performed using the same protocol.The noisy measurement state ofmθis shown in Fig.7.
The estimation error behavior of the optimized FHGO in the presence of Gaussian noise is shown in Fig.13.These figures show that the statesmθandpmcare well estimated (without the peaking phenomenon),and their estimates are well filtered by the FHGO observer.

Fig.13 Performance of the optimized FHGO in the presence of Gaussian measurement noise
5.6 Results and discussion
For a clear comparison,the performances of the proposed observers are summarized in Tab.3.For the two types of noise signals used in the simulation,the infinity norm of the master cylinder pressure estimation error ||||∞and the initial peak value of the estimated master cylinder pressure(0)(starting from=10 bar(1 bar=0.1 MPa)) are shown in Tab.3.Note that ||||∞and(0) are indicated by bars.
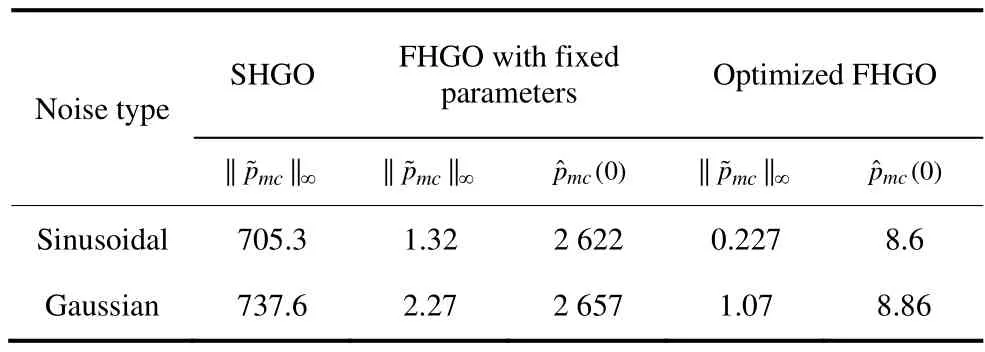
Tab.3 Performance comparison of the proposed observers in the presence of two types of measurement noise
The simulation graphs are shown in Figs.9-13 and the performance indices are reported in Tab.3.The following conclusions were drawn.
(1) The asymptotic behavior of the SHGO in the presence of measurement noise is not guaranteed.Therefore,the structure is not recommended for practical applications.
(2) FHGO with fixed parameters can guarantee good state estimation and noise suppression,but clearly suffers from the peak phenomenon.
(3) The FHGO with ES optimization can achieve a good estimation performance for both types of measurement noise.It exhibits excellent asymptotic behavior with a relatively negligible estimation error and a low peak value at the origin.
Based on the above points,the proposed FHGO with ES-based parameter optimization provides a good estimation of the EHB states,regardless of the type of measurement noise.In addition,it can qualify as a peak-free observer.The optimization of FHGO is highly recommended for practical EHB.
6 Conclusions and perspectives
The issue of online estimation of rotor position,rotor speed,motor current,and master cylinder pressure of an EHB for EVs in the presence of noise was addressed in this study.A filtered high-gain observer(FHGO) was proposed for EHBs.First,an EHB state-space model with four state variables is described.The EHB observability was then checked,and a model transformation by diffeomorphism to a uniformly observable form was carried out.The FHGO for the estimation of EHB model state variables was designed,and observer stability analysis using the Lyapunov theory was proved.To avoid the complexity of the FHGO setting parameters and achieve better FHGO performance,an online ES optimization of the observer tuning parameters was performed.The theoretical results were validated by simulations using the Matlab/Simulink software.The results demonstrated the high performance and robustness of the proposed FHGO.The experimental validation of the observer offered for the EHB system is considered as the perspective of this study.We also plan to perform ES-based optimization to optimally select therorder of the low-pass filter.
 Chinese Journal of Electrical Engineering2023年4期
Chinese Journal of Electrical Engineering2023年4期
- Chinese Journal of Electrical Engineering的其它文章
- A Review of Isolated Bidirectional DC-DC Converters for Data Centers*
- Review of Hybrid Packaging Methods for Power Modules*
- Vibration Reduction and Torque Improvement of Integral-slot SPM Machines Using PM Harmonic Injection*
- Calculation of Available Transfer Capability Using Hybrid Chaotic Selfish Herd Optimizer and 24 Hours RES-thermal Scheduling
- Improved Approaches Toward Analysis of Electromagnetic Processes in Electrodynamical Devices Based on the Theory of Electromagnetic Field
- A Novel Modified Fuzzy-predictive Control of Permanent Magnet Synchronous Generator Based Wind Energy Conversion System